
大疆 机甲大师 RoboMaster S1 开箱、初体验
![]() 再生妖精
2019-08-30 14:21
再生妖精
2019-08-30 14:21
大疆的RoboMaster机甲大师赛很早之前就现场观摩过,那时候相关的开发套件仅面向校园团体并不公开销售。随着技术的成熟以及在比赛中的打磨,最终首款面向普通消费者的消费级机甲大师产品--RoboMaster S1面世了。其实这款产品已经发布有一段时间了,但因为一直货源紧俏,迟迟没有到手。从官方大疆旗舰店预售购买,30天内发货,真是不多不少下单后第30天顺丰发出。

箱子又大又沉

好在顶部有提手,可以较容易的携带。

箱子内部分为上下两层,各零件都被规整的放在纸卡中。


其中一个小包装内放了说明书、保修卡、视觉识别卡等纸制品。

大疆 机甲大师RoboMaster S1需要自行拼装,大部件爆炸图如下。
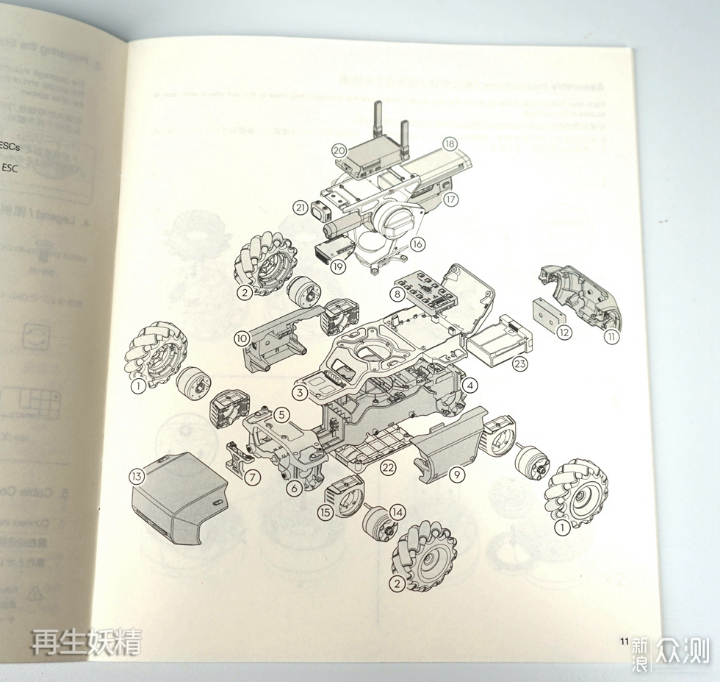
如拼装积木一般,每一个步骤都有详细的安装示意图。
包装内提供了工具盒及工具,所有螺丝均为内六角螺丝。


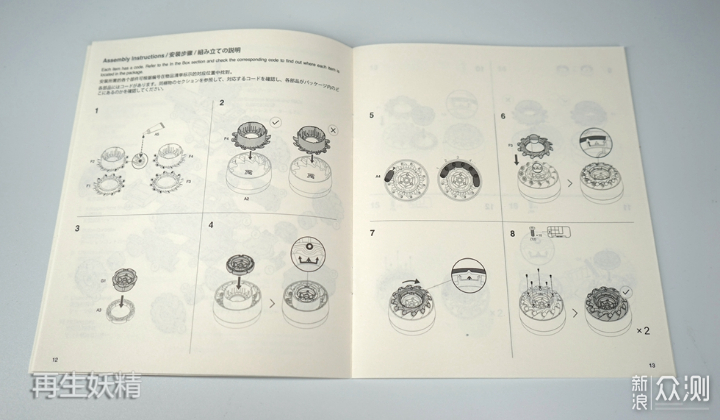
先来拼装轮胎。大疆 机甲大师RoboMaster S1有个非常重要的产品特点就是采用了用户自行拼装的麦克纳姆轮,从而实现矢量方向行进。
麦克纳姆轮依靠各自机轮的方向和速度,将动力合成产生一个合力矢量,使运动平台在最终的合力矢量方向上自由地移动,而不改变机轮自身的方向。麦克纳姆轮结构紧凑,运动灵活,是很成功的一种全方位轮。

由于组装麦克纳姆轮需要特定的角度,凭空组装难度太高,官方还在包装中提供了专门的治具,帮助用户完成麦克纳姆轮的组装。

完成四个轮子的组装后还有两个备用小轮。

轮子拼装完成后就进入主体的连接
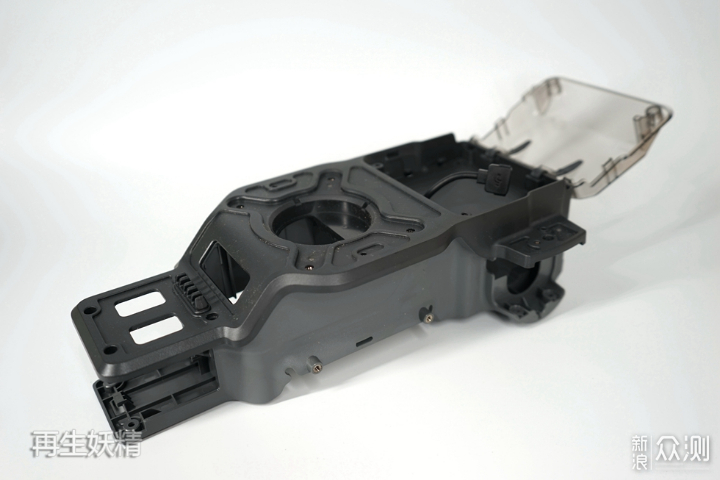
要将主控板与各部分舵机、传感器逐一固定连接,最终完成整机的拼装。

长度不一的连接线有多条,需要按说明书进行选择。

4个击打传感器

按照说明书,将击打传感器安装在机身四周。


四个驱动麦克纳姆轮的无刷电机以及带有一定散热片功能的电机固定装置。


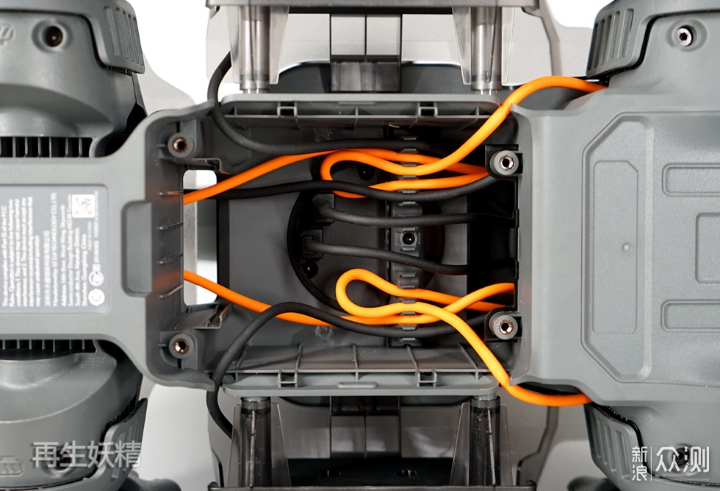
轮子安装完毕,底部走线位置内置理线槽,可以对连接线进行固定和整理。


安装头部云台

主武器

2.4光圈,120度视角的防抖摄像头。

连接完所有部件后,线槽内基本已被各类连接线占满,可以安装底盖了。
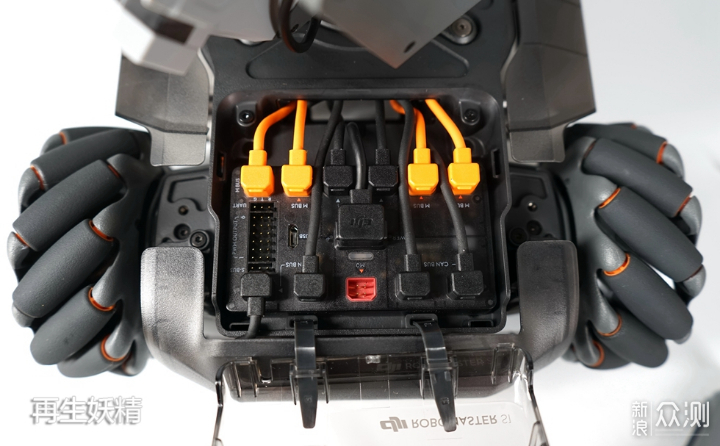
主控板运动控制器上也是插得满满当当。
还有一个水弹弹仓,需要先泡水弹。水弹大约要泡4个小时,一瓶盖就可以泡发约400颗的水弹。


整机安装完成

包装内的电池几乎没什么余电,需要先进行充电。

电池2400mAh,输出电压10.8V。

充电器类似一个外挂模块,将电池卡在上面就可以看到充电指示灯亮起。

充满电大概需要一个半小时,充电后就可以插入电池开机了。开关键就是电池上的圆形按钮,长按2秒开机。


App名为RoboMaster,应用商店一搜即得。

如果已有大疆账号,可直接登陆,没有的话需要先注册一个。

首次连接建议使用路由模式,这样方便注册设备和更新固件。

通过摄像头扫描二维码获得WiFi信息,从而连接路由器。

连接完成后要进行机器人初始化,包括设备激活、电机的检测和装甲的检测,确认无误后设备便连接完成。

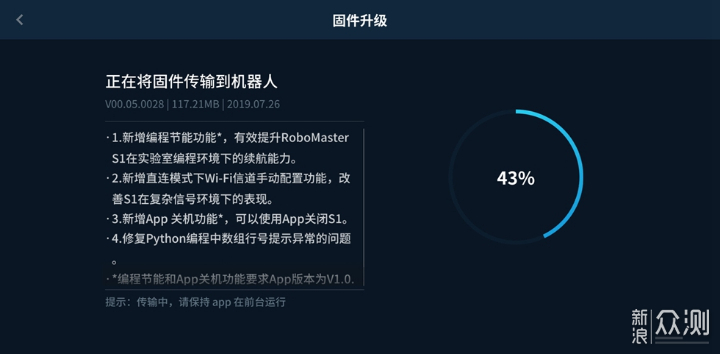
新设备建议先完成固件升级
准备工作都完成后就可以进入实操了。可以看到主界面有三大模块,分别是:单机驾驶、多人竞技、实验室。

单机驾驶
因为只有一台,只能先玩单机驾驶。操作简单易上手,和绝大多数游戏类似,左手控制主机移动,右手控制视角。

画面整体清晰度一般,开始我以为是因为传输降低了画质,但我装了SD卡,直接本地录制,画质也是比较苍白。但画面传输后非常流畅且延迟很低。

亲自试了一下水弹打到身上有一些痛感的,但相比市面主流水弹枪还是弱了不少。

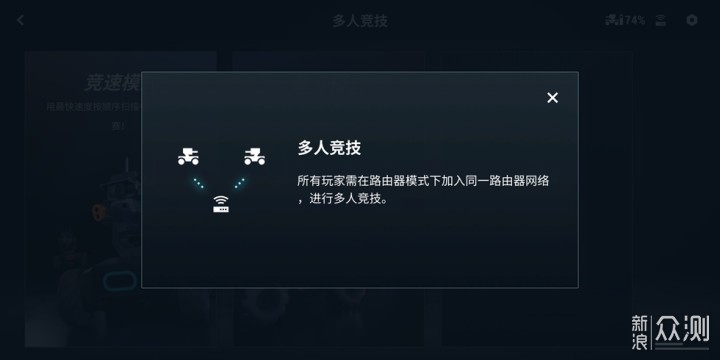
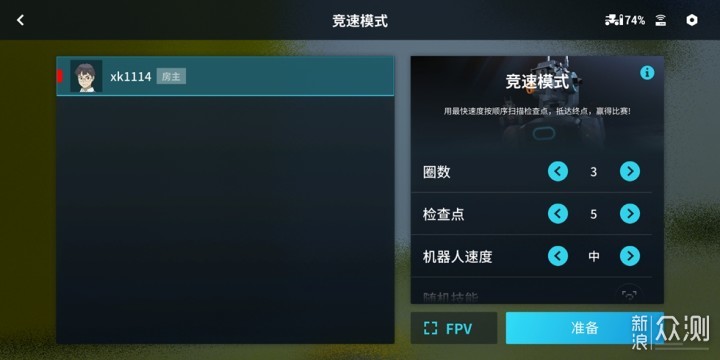
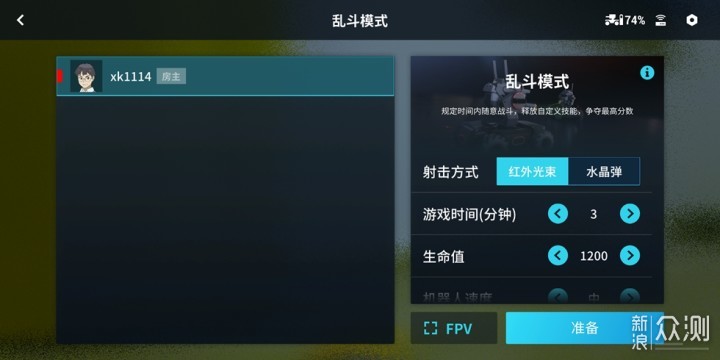
多人竞技
多人竞技有竞速和乱斗两个模式,需要所有机器人连接同一个路由器网络。

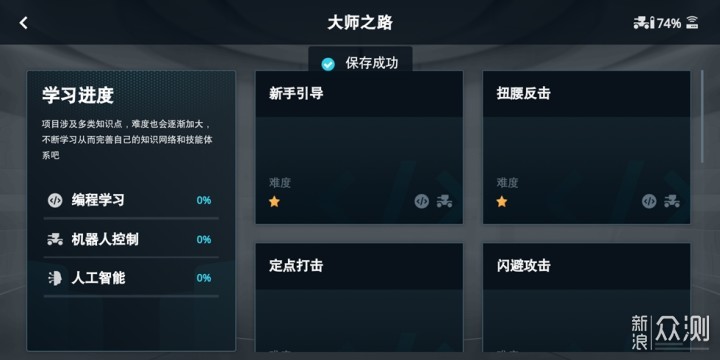
实验室
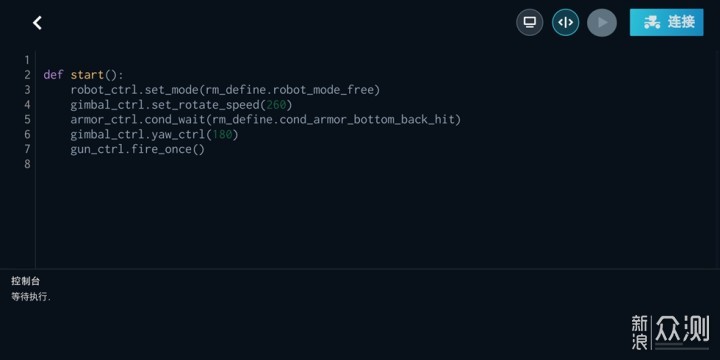
实验室内主要进行的是机器人编程相关功能。

大师之路可以理解为教学模式,会一步步引导进行初级的编程功能。

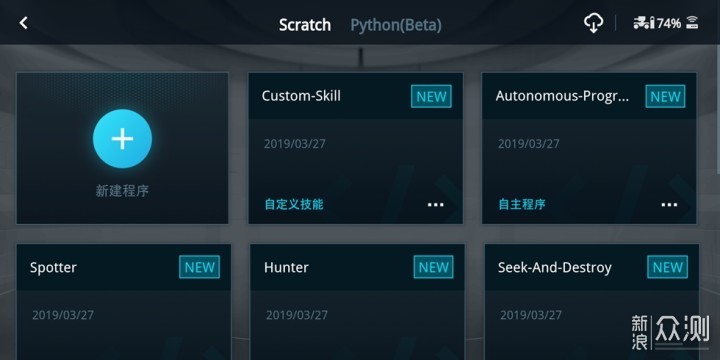
我的程序就是一个程序编辑器,可以使用可视化模块编程或直接使用Python语言直接编程。

另外App还包含机器人的相关设置,这里就不赘述了。
千万别小看这么一个看似遥控玩具的产品,这绝对是当今多种热门机器人技术的结晶。防抖图传、图像识别、多传感器融合、电机控制、设备控制、矢量运动、Python编程,有机的融合在一起,形成一个面向C端普通用户的产品。这是一个真正意义上的面向普通消费者的可编程机器人平台。当你自己动手完成组成并简单控制后,那种“高级感”会让你觉得,3499的价格真的算是很有性价比了。


优点:
1.采用了用户自行组装的方式,一方面降低了组装的成本,另一方面在组装的过程中让用户对整个机器的结构和连接方式有了较为全面的了解,方便日后的改装或维修。
2.整机运动控制相当灵敏且协调,四个无刷电机驱动四个麦克纳姆轮驱动,可高速矢量运动,且非常静音。
3.支持手机直连模式和路由器两种连接模式,可以30帧/秒进行720P画面的图传。无论哪种连接模式,图像延迟都非常低,实测在200ms左右。
4.支持多人竞技,独乐了不如众乐乐。
5.非常深度的编程能力,有一定的教学引导,采用可视化模块编程或Python语言编程,对7个电机、7个红外传感器、1个摄像头、1个麦克风、1个扬声器、2个陀螺仪、21个LED灯,均可通过进行配置或调用。
6.集成视觉算法,包括巡线、标签识别、人形跟随、掌声识别、人体姿势识别、同类机器人识别,这些算法可以直接在编程中调用。
7.6个PWM脉宽调制接口,可扩展控制其他外接设备。
8.红外射击或实体水弹射击,让趣味性增大不少
不足:
1.电池待机时间短,充满电需1个半小时,只能实际使用半小时。
2.未集成防跌落、壁障、惯性导航等能力或算法。
3.从激活开始,只有半年保修期。
4.拍摄图像质量一般。
5.组装过程对动手能力有较高的要求。
关注官方微博 微博
关注官方微信

Copyright © 1996-2024 SINA Corporation, All Rights Reserved 新浪公司 版权所有







