
万字详评:米家新一代拖扫机 VS 石头T6拖扫机
![]() yliensun
2019-09-12 09:10
yliensun
2019-09-12 09:10
众所周知,米家前两款扫地机器人(2016年的米家一代&2019年的米家1S)都是石头科技的产品,并且从第一代就是LDS激光导航传感器和SLAM算法(Simultaneous Localization And Mapping 即时定位与地图构建)。正是因为石头科技把米家一代打造得如此前卫,并且价格合理,才让扫地机器人被国人熟知而进入千家万户。之后石头又通过自己的S5系列,将拖地功能结合。本来我之前对扫地机器人拖地的看法是持有怀疑态度的,主要是觉得机器人体重太轻,拖地没有足够的力量效果不会太好,并且老得记着取下抹布防止发霉也觉得有些麻烦。但这一用才发现,之前单纯的扫地并不能让地板恢复干涩的感觉,但是拖扫可以。难怪连雷布斯之前也说扫地机器人不用拖地,这次也做了改变推出了米家新一代拖扫机器人,可想而知拖扫一体的魅力。

米家新一代拖扫机器人(下面简称米2吧)作为米家第一款带有拖地功能的机器人,官方定价¥1999(活动价¥1799)比同样带有拖地石头T6(官价¥2549,活动价¥2300)便宜了¥500左右,很多人也会问米2与T6的¥500差价值吗?

正巧,我一个朋友在米2活动价的时候购买了一台,我知道了这个消息后,趁着热乎赶紧借过来和我的石头T6进行了本次文章的对比测试,为此我希望这篇文章可以给大家带来答案。首先要说的是这次的米2已经不是由石头科技制造的了,而是由云米委托深圳市杉川机器人有限公司制造的产品。这家公司除了拥有自己品牌的机器人外,同时还代工国美的智能吸尘器、网易智造激光导航扫地机机器人以及LDS雷达等等产品,具体口碑怎么样,可以搜索站内相关机器人了解。

而米家下面这些型号都是石头科技制造的,想买石头科技制造的话别买错了:

先来看看纸面参数:
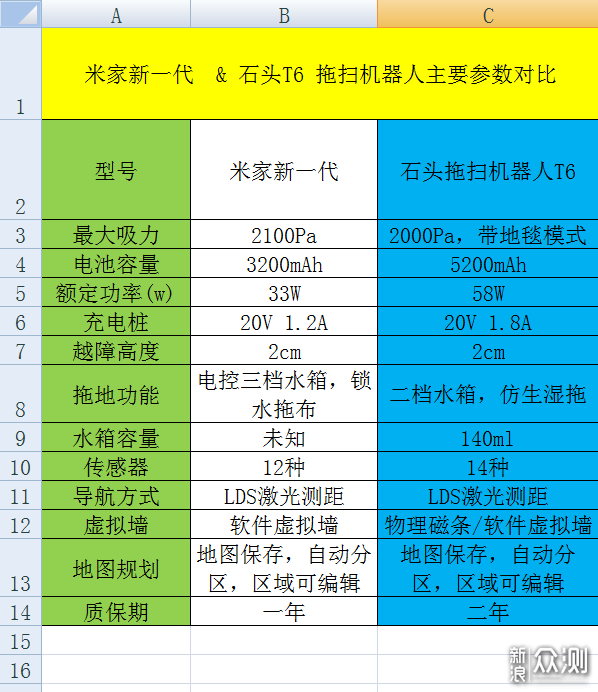
参数很多时候并不能清楚的展现实际使用能力,只有使用才能体会到产品巨大的差异,所以这篇也会有大量使用对比测试。
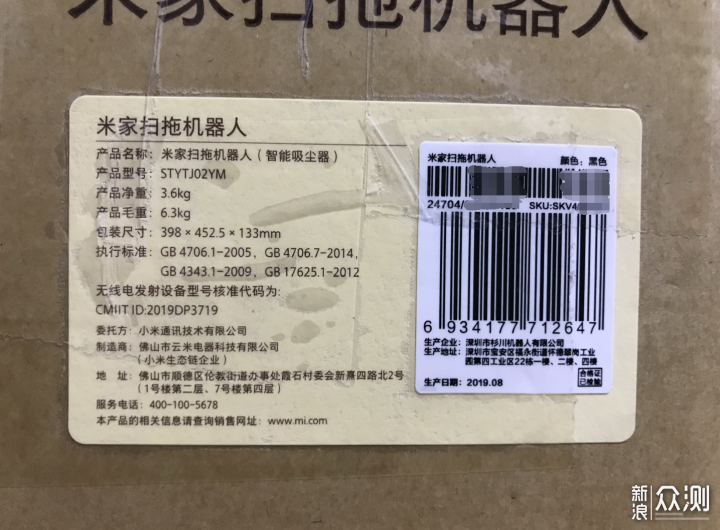
首先米2盒子的侧面的铭牌已经表明了自己云米以及杉川制造的身份。净重3.6KG,与石头T6重量一样,型号标记为STYTJ02YM(YM可能代表着云米)
配件一览,东西还是很丰富的,但没有了石头的抛弃型拖布,只有全湿和半湿两种各一块的重复使用拖布。

两款都是黑色,还挺般配。米2的外壳和T4很像,为镜面设计。两款都被圆形设计,这也是目前国内扫地机器人主要采用的形态。

充电桩米2的小了非常多,这点倒是很不错。

但代价是变压功能外置以及没有了收线的能力。加上变压插头和长长的线缆体积又膨胀了一些:

同时失去的还有石头充电桩左右都可穿槽出电源线的能力。米2的充电桩只有左单侧有电源口。

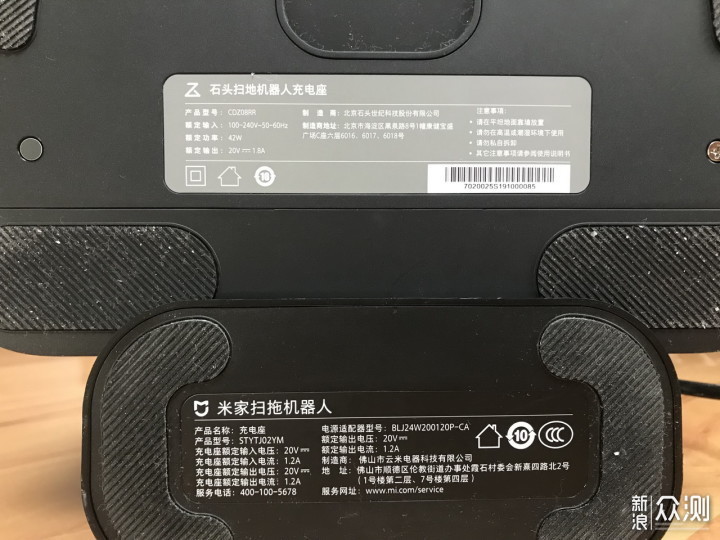
充电功率米2只有24W,而石头T6的是36W,差了50%。更大的充电功率才能减少充电时间,不过米2只有3200mah的电池,对比T6 5200mah的电池充满电时间上预计差不多。
看看机器设计上的细节。

两款机器人前部都有回充传感器,形状少许有些区别,这应该没有什么关系:

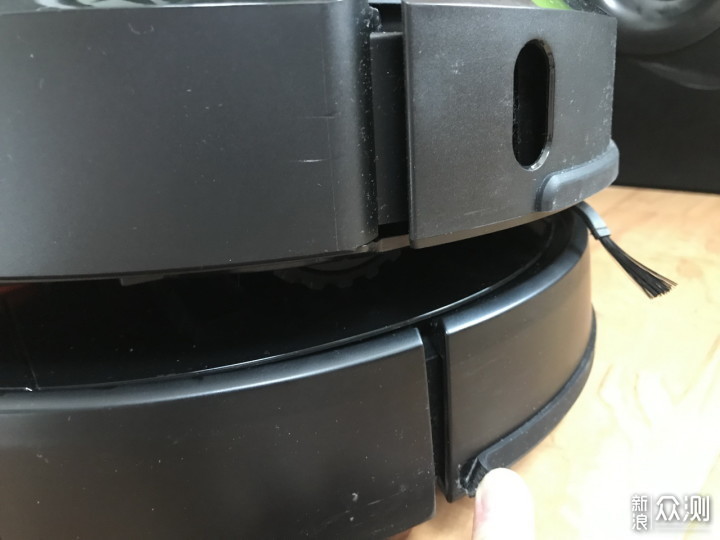
侧面看米2没有了沿墙传感器(比T6少的第一个传感器)。沿墙传感器能让机器人机身稳定控制距离在10mm左右,有较好的沿墙清扫效果确保不漏扫。米2去掉这个传感器具体会有什么影响,使用的时候再细看。

前面的碰撞传感器护板底部有防撞护条,我是看到米2这里有少许错位,没想到稍微一抠就撕开了,而T6的我特意大力抠了一下,纹丝不动。貌似T6的是与保护板一体制造的,而米2的是双面胶粘贴的,所以比较容易撕开。
后部米2保持了之前两款石头造米家非拖地机型的外观,有上下两条充电触点。T6的充电接口为了让充电时可以接续摘取拖地水箱,而转移到了头部的下面。

开关都在机器的前盖上。米2还是和之前米家的一样为双按键,分别是开关和回充。

T6为三按键,将局部清扫分离了出来,需要局部清扫时可直接切换,使用上更加方便。

米2LDS激光传感器上盖处没有激光头压力传感器,所以当有高度正好平齐与LDS激光头的时候可能会对其造成摩擦,并且貌似米2在这里的材料有些偏软导致容易现了磨痕。

对比T6 LDS激光头上盖的压力传感器(通过压力触发后退操作),这是米2少的第二个传感器。

打开上面舱盖后,就是尘盒舱。米2的拖地水箱是于尘盒一体的,所以准备了两种尘盒用来对应扫地和拖扫。

米2和T6都在这里设计了清洁刷收纳槽,米2特意提醒了注意刀片,这点不错。

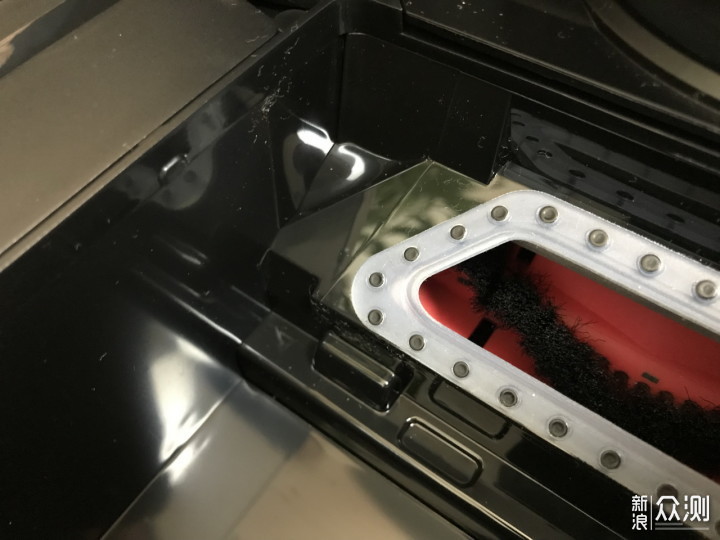
米2尘舱与尘刷接口处的有橡胶密封圈,但是与尘舱进尘口平齐:

T6则是凸出的,这样当尘盒放入时,可以与接口连接更紧密,并且做工上看着也更精致一些。

米2尘舱带有水箱功能,所以底部多了一些孔可以让水渗透到下面的拖布上。不过这里后面就是风机的入口,从之前拆解的扫地机看,拖地机器人的防水保护层基本集中在前部的电路板上,风机是没有额外防水保护的。所以即使石头是有可水洗滤网,也特别提示清洗后要晾干再使用,因此这种位置放水箱时并注意盖紧别漏了,同时也要把水箱擦干点。

米2的两款尘盒,只有标准尘盒可彻底打开清理。而尘水二合一尘盒为一体化,只能从后面的滤网处打开清理,稍微不便。二合一尘盒上有注水口。

二合一尘盒底部的凸起我这时以为是出水口,但实际是定位孔,再旁边的两个平齐的才是出水孔。

二合一尘盒透过透明塑料可以看到里面的小水泵和水管,通过电子控制出水量,这就是电控水箱的奥秘。

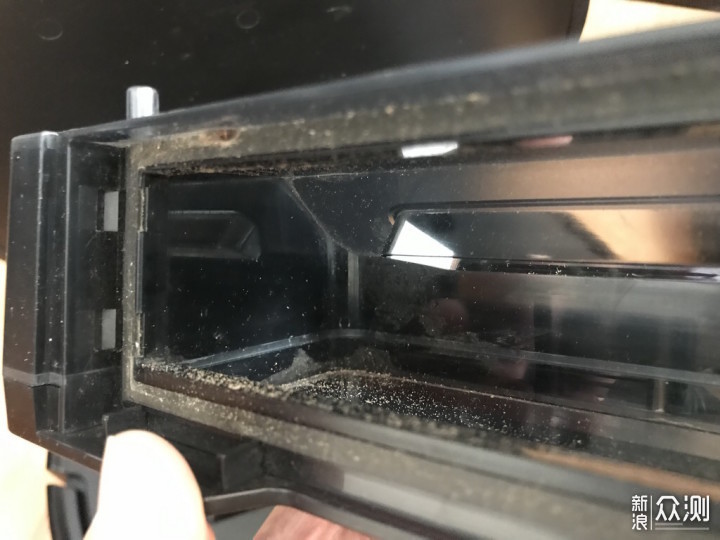
在这里继续发现细节差异,米2的吸尘进口处为塑料材质,而T6的还有一层橡胶圈。加上之前机器接口的凸起橡胶层,哪个结合更紧密从而让更多的粉尘进入尘盒不言而喻了吧。

这也解释了为何我之前看到米2尘盒舱中边沿处有不少灰尘,而T6则干净的多。这还是刚拿到米2的时候擦拭过的,否则更多。我当时还奇怪我的朋友怎么用的这么狠

T6尘舱里面真的没擦过
看看底部差异。乍一看差不多,也就是尘盒位置T6更靠后,但仔细看同样不少细节差异:

首先米2的边刷是需要自己安装的,好在直接插上即可。

对比石头一直使用螺丝固定的方式,稳固度肯定是不如T6的。另一个带来的问题就是之前米家和石头的机器人耗材全部通用的历史也被打破(毕竟之前的全是石头科技造的)。

T6具有的6个防跌落传感器也被阉割了左右2个,恢复成了最早米家一代的4个。T6则会有更好的防跌落能力。

米2的前轮是直接插入的结构,稍微用力可拔出,对比T6使劲但是没拔出来。为什么会留意到这里?因为这台机器我拿过来的时候发现前轮掉了,这里不知道算不算是特例。

两款机器底部的铭牌。米2额定功率的33W对比T6的58W。不过别忘了米2可是2100Pa的机器,额定功率却和1000Pa的科沃斯某型号机型一样,只有石头T6 2000Pa吸力机器额定功率的56%,不知道是怎么做到的。官方说是优化了风道,那这个就厉害了,等着大佬的拆解吧,我之后只能用我的方式简单测试一下。

米2去掉了之前石头一直延续好评的浮动主刷技术,变成了固定死的。

对比T6的可以随着地形浮动的主刷,同时也会带来更好的地形适配性和清扫效果。

尘刷主刷罩都可拆下,造型都与之前石头科技机型的不同,所以耗材继续不通用。

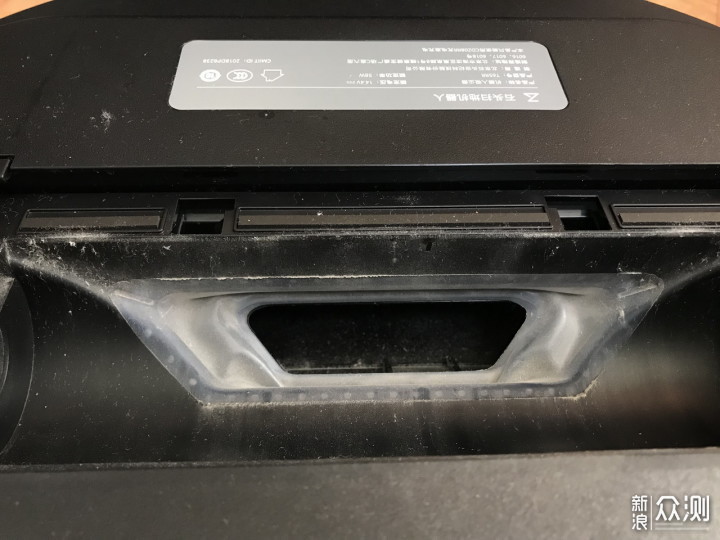
取下尘刷的尘刷仓,米2进尘口这次则是空空荡荡的了。
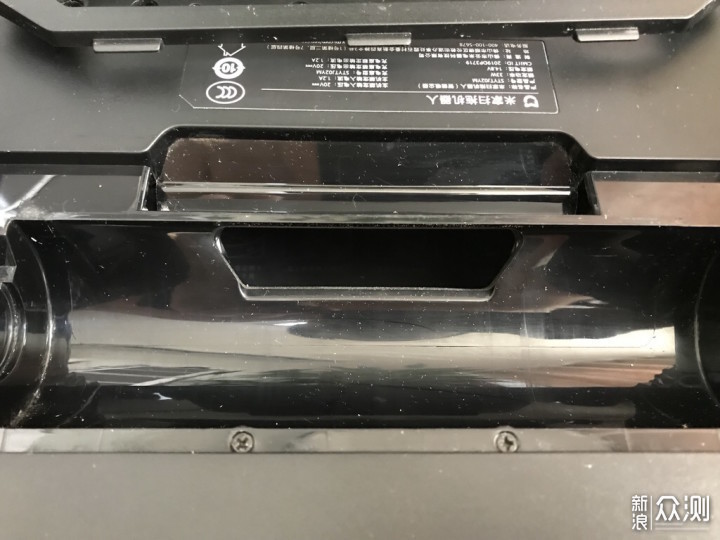
对比T6从里面一直延伸到外侧的带有软胶层的进尘口,可让灰尘更全面得导入尘盒。
两款主刷对比。T6是带有两段快拆结构的主刷,更容易清理头发。


上图中发现了有意思的地方。T6的主刷每条叶片中间开了两个口,是为了不摩擦到主刷罩上面的两根钢丝。
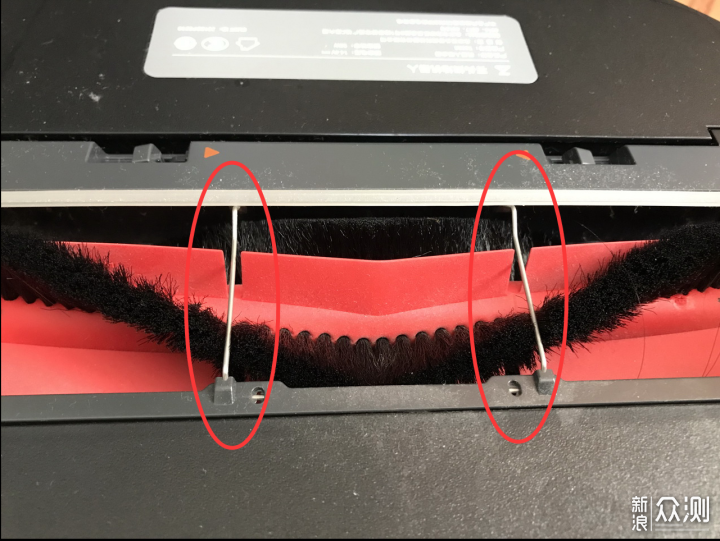
而米2的主刷罩本身就没有这两根钢丝,不知道开这些口的目的是什么?并且口开的还挺大。难怪有人说米2是抄作业连名字都抄上去了。对比上面T6的尘刷毛也稀疏了很多。

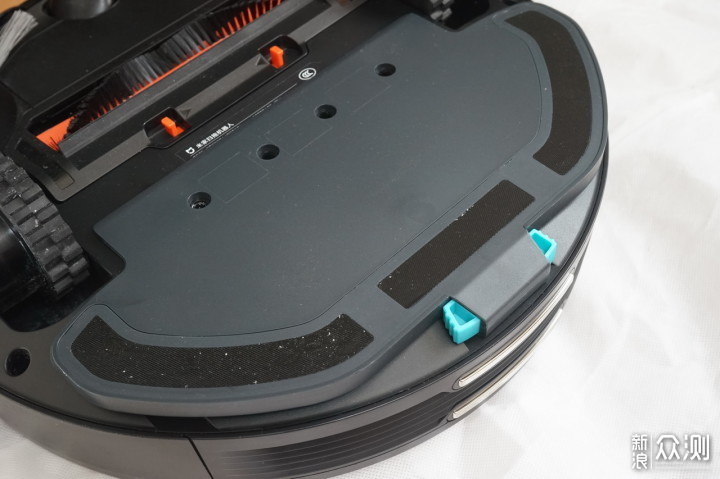
米2尾部除了充电触点外,拖地底板的固定槽也在此处:

对比T6以及T4的第三方水箱,因为米2的水箱在尘舱内部,所以中间处米2所使用的只是拖布的固定板不再起到水箱的作用,因此非常单薄。

单手就可安装的底板倒是非常方便。

固定后的效果图。虽然单手安装比较方便,但是看出来问题了吗?因为充电触点也在这里,所以充电过程中无法直接拆卸以及安装拖布的。
这种不便我觉得是丢了西瓜捡了芝麻的事情。米2并没有配置隔水垫,带着刚拖完地湿湿的拖布充电,对地板的保护以及充电的安全性都可能带来影响。

对比石头拖扫机器人充电时头部指向充电桩,尾部在外随时可以取水箱的设计,米2真的是非常不方便。其实T6也可以单手安装,但取下则必须两边都释放卡扣。

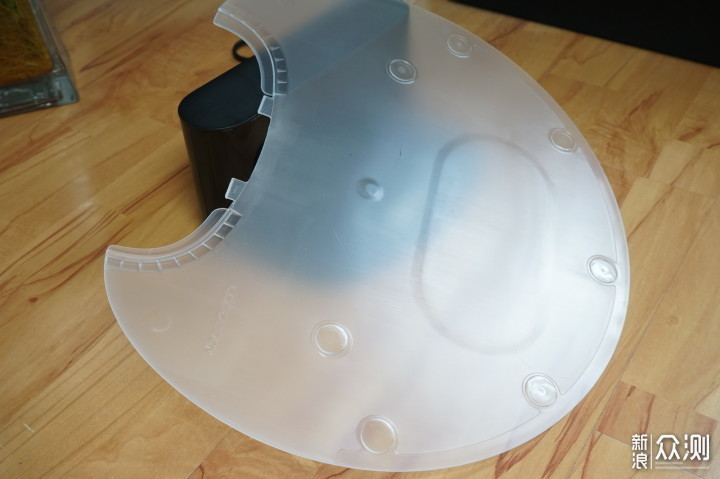
T6防止湿拖布持续沾染地板的大片隔水垫。
米2安装拖布底板后,能看到4个孔洞,但只有两侧的才是出水孔,正好对应的是水箱外侧的两个孔:

拖布的安装都采用了前段快拆装,后端魔术贴的设计。不同的是米2为套入,T6使用的是导向槽,这两种结构都很稳定,替换也非常方便。

拖布的设计理念差异比较大。米2为大片的与机器同宽度的锁水拖布,而T6的仿生拖布接触地面的毛绒部分只是于主刷同宽,两端是没有毛绒的,避免把没有吸尘的地方和稀泥,做到每一块地方都是先扫再拖。但是米2的这种设计可以让开始清扫时地图框最外侧区域可以被拖布照顾到。

庆幸的是米2没有将拖布的浮动能力取消,哪怕浮动能力比T6稍微弱一些:

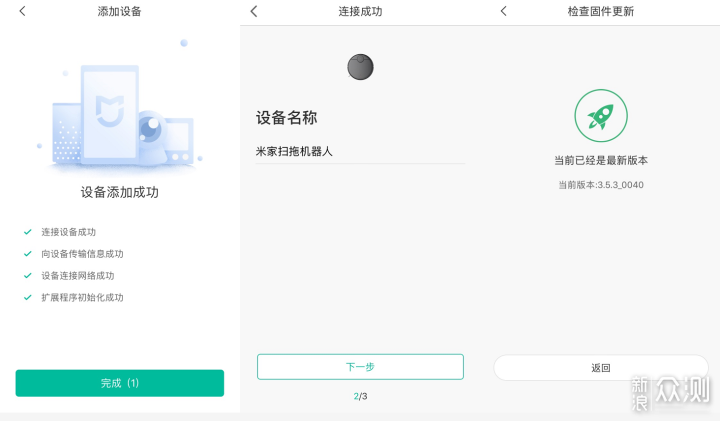
米家以及石头的所有机器人都可脱离网络直接使用的,但是为了更好的体验,还是建议接入智能App。米2目前看只能支持米家App,而石头T6不仅支持使用米家App、还能支持天猫精灵。从米家App添加设备中从生活电器找到扫地机器人,除了最后的为云米杉川制造外,其他的几款都是石头科技制造的,也别选错了。配对和米家大多数设备一样,先进入配对模式后,在2.4G的频段下直接接入石头机器人的WiFi。WiFi命名也从石头的roborock-XXX变成了viomi-XXX。

设备添加还是很顺利的,自动命名的名称为米家扫拖机器人,以后的测试也是基于米2目前最新版的固件。
回充路径以及效率测试:每每的机器人我都是先通过回充的速度来初步判定路径导航以及寻找充电座的能力。米2的回充由于红外定位在前端,需要靠近后再旋转来回充,整个的过程和米一代很像。


T6由于定位以及导向结构不同,表现得更行云流水。


充电过程中又发现了一个很重要的不同点,T6在充电中如果脱开充电桩会自动回充,米2则不会。首先看一下T6的表现,在我用手强制拖桩后,自己慢悠悠得又找回去继续充电去了。


而米2同样的操作就傻在外面了。

并且更神奇的是后期出现了手动再推回去,充电桩竟自动把它弹开。再次按下回充键才恢复正常。好在我之后彻底启动清扫又再次回充,貌似这个问题消失了,就当是蜜汁事件个体差异吧。

如果没有拖桩重连能力的话,充电过程中人或宠物可能会碰到机器人造成拖桩,之后机器就在那待机到关机,人也不注意,导致使用时却发现没电了,尴尬!这个问题希望之后的固件可以改进。地图保存以及路径规划测试:正式使用开始。目前新出的扫地机基本都带有地图保存功能,所以在新环境中都建议第一次清扫让它做全屋扫描。地图绘制以及清扫方式也是先边框在弓字形。设置中有更丰富的选项,地图保存是默认打开的,但这里可以发现米2语音包是不能选择的,只有一种声音未免使用起来会有些单调。石头科技的可选的有多达十几种语音包,类似“臣妾去扫地了”莫名的喜感,为生活带来更多情趣。

障碍物防撞测试表现,米2减速虽然是做到了,但对比下面动图中T6的表现那个优劣不用多说了吧。并且T6减速后会二次尝试尽量贴近我的脚,进行清扫;而米2是简单划了一下然后绕过去了。

T6的表现。

虽然米2没有了沿墙传感器,但对于直线的墙边还是没有压力的,走的很平直。

但没有该传感器所导致的精度不足反映在非直线物体上,比如下图中我的带有弧度的桌子腿。米2明显离得过于远了,这样肯定会出现漏扫的问题。

方正地形上米2弓字形走的不错。这里发现米2更喜欢南北走向,石头喜欢东西走向,也算是个无关紧要的小差异吧。

米2首次扫地完成后地图绘制工作也随之完成。从地图上看弓字形走线还是很漂亮的,貌似路径导航还不错(注意看是貌似哦,实际还得看后续详解)。米2的清扫界面下直接可以调整吸力大小,这个比T6需要进入设置界面选择方便一些。T6同样的位置是地图规划,而米2又把地图规划放到了设置中,这里我其实喜欢米2的放置方式,毕竟地图设置好后再次改变的机会不多,吸力调整算更常用一些。
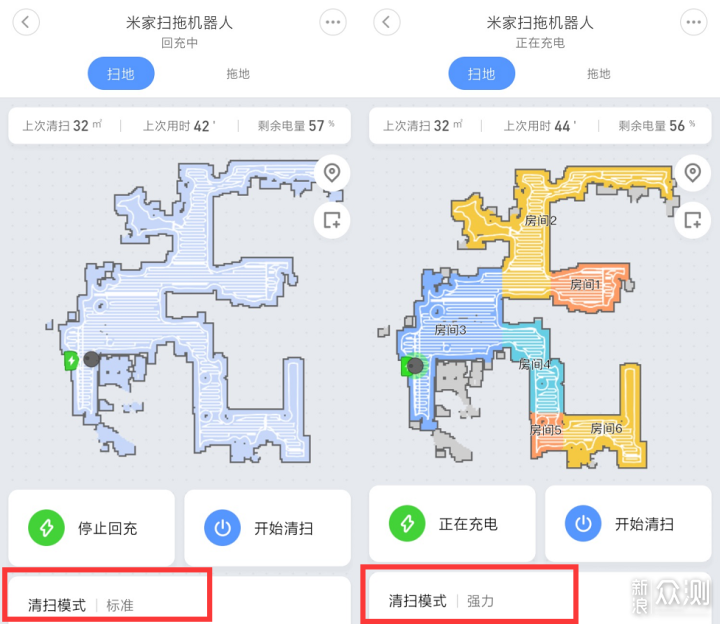

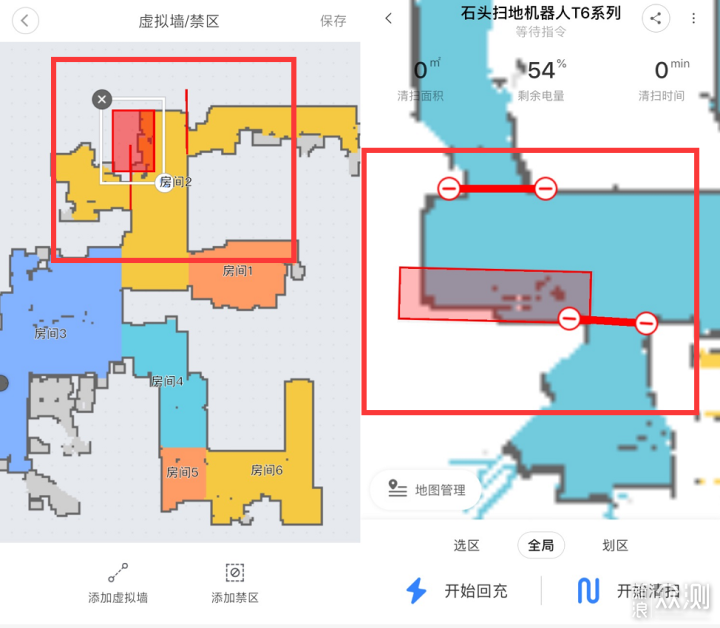
再添加软件虚拟墙时,又出现了无语的事情。米2的地图不管是虚拟墙还是禁区,可以规划的最小长度和最小面积比T6的要大,以至于做出来的图就如左边一样,要么虚拟墙伸出去一截,要么巨大的一个多余大方块,可能设计上使用米2的人家里都是大户型吧,门都得是两个普通门那么宽。
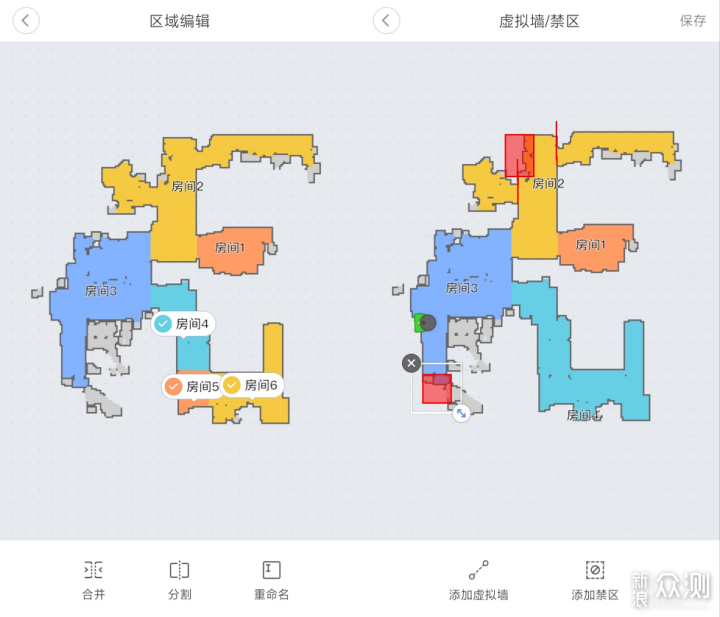
房间4,5,6都是卧室,所以这里把它合并。结果当一起选择4,5,6合并的时候提示跨区了,只能先合并4和5,然后再与6合并,汗一个。最终的保存地图为右边这样。
对比T6的地图,90度翻转了一下,这个也是无所谓的差异。
两款机器都是LDS激光导航,所以地图的精准度都不错,也能很好的识别障碍物,未清扫前清理掉障碍物后也能即使更新地图不会遗漏。
虽然两款都号称2cm越障能力,表现上还是有些差异的。我家正好2cm高度的帕克伦爬行垫继续登场。米2未带拖布组件的表现,二跳了一下,带上拖布组件后更会受到一些影响。

对比带着水箱的T6 2cm高度都能一蹴而就的效果可就差了不是那么一点点了。

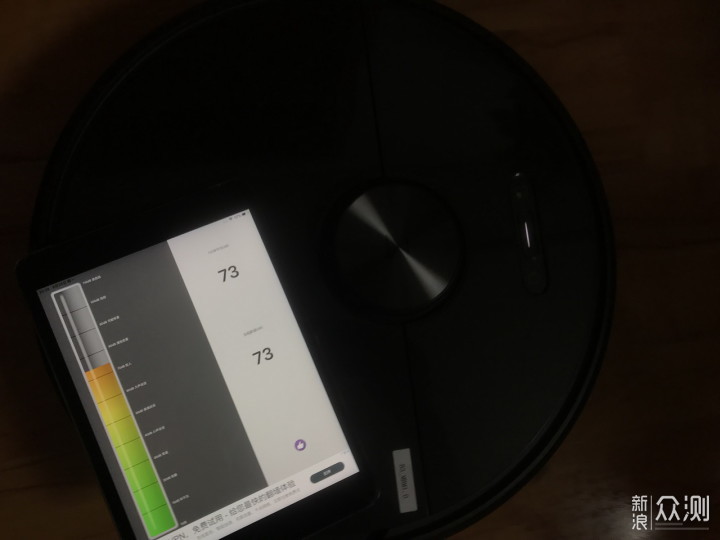
还是用简易的测声App来看看,由于机器人跑起来太快,很难保持测声要求的一米左右的高度,加上是软件测声所以只是提供参考,但我所有测试声音的时候都用的是同款软件,所以对比的话应该是够了。标准档工作时米2噪声显示为80db。
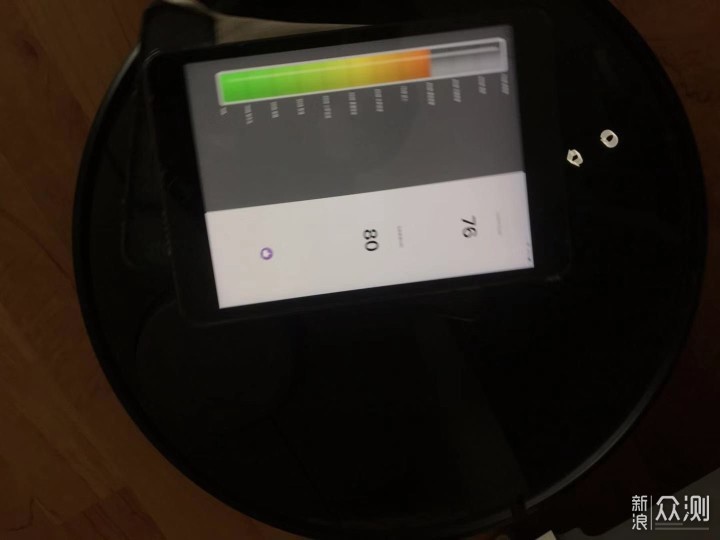
对比T6的73db稍微高了一些,但T6工作时类似呜呜呜的声音又在米2上恢复成米1那种嗡嗡嗡的烦人声音,看来石头在今年新的T4以及T6上面使用的降噪处理确实挺有效果的。
两台机器都在充满电中。

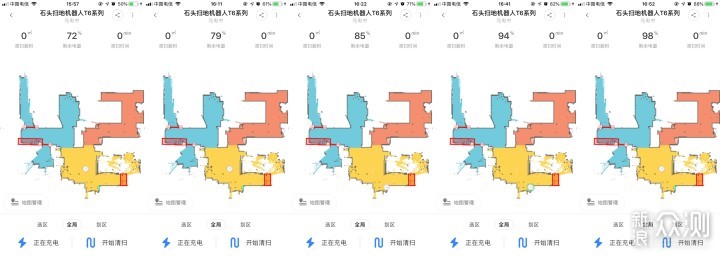
充电过程虽然米2的充电桩输出功率只有T6的66%,但米2电池3200mah对比T6的5200mah,也是61%左右,所以充电速度没有明显的差异,但之后测试的续航能力真的是差异巨大,先提前预告一下。米2由66%充到99%,耗时55分,同样的时间下,T6由72%充到98%,T6还是稍微慢了一点,毕竟T6内置电池的容量级别在扫地机里一直是前茅。

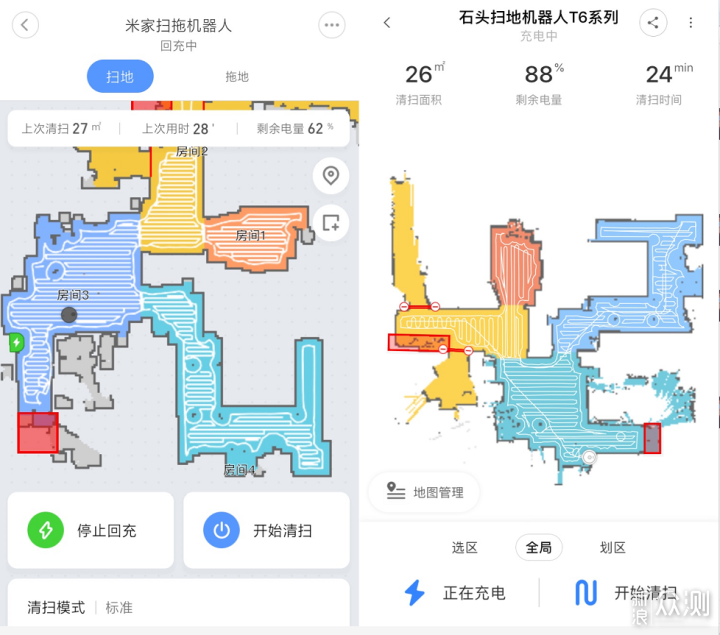
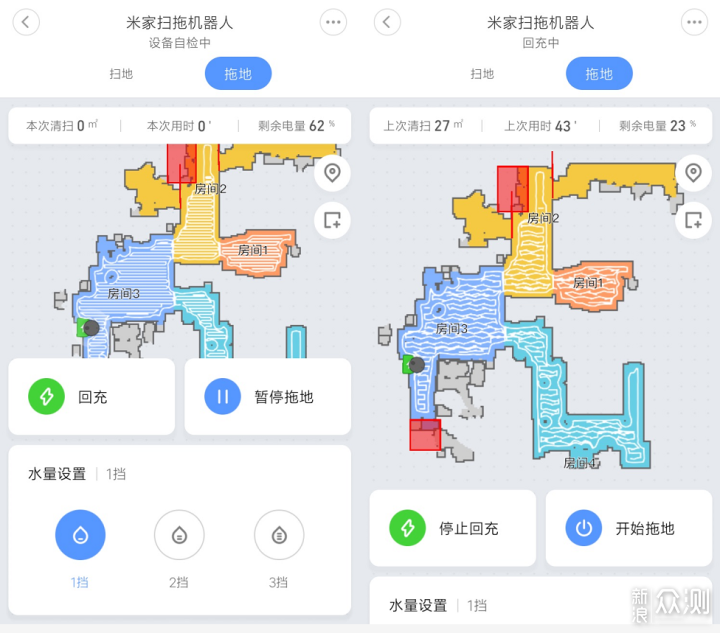
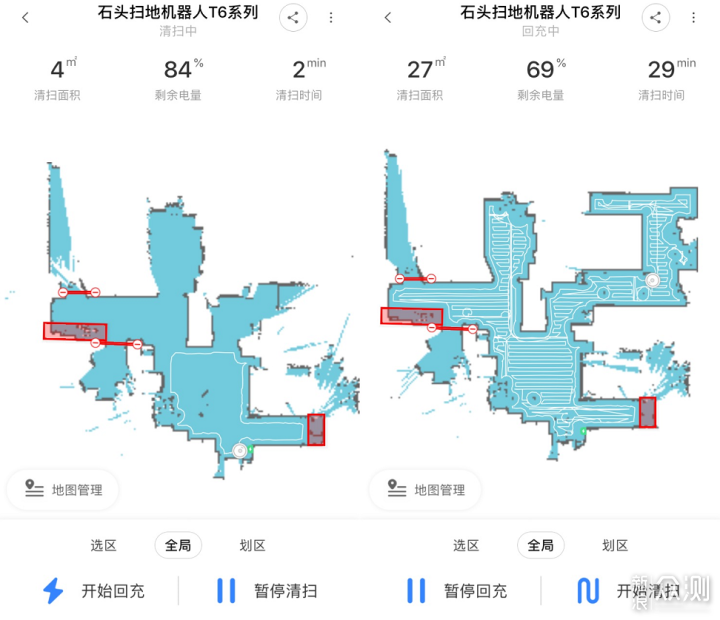
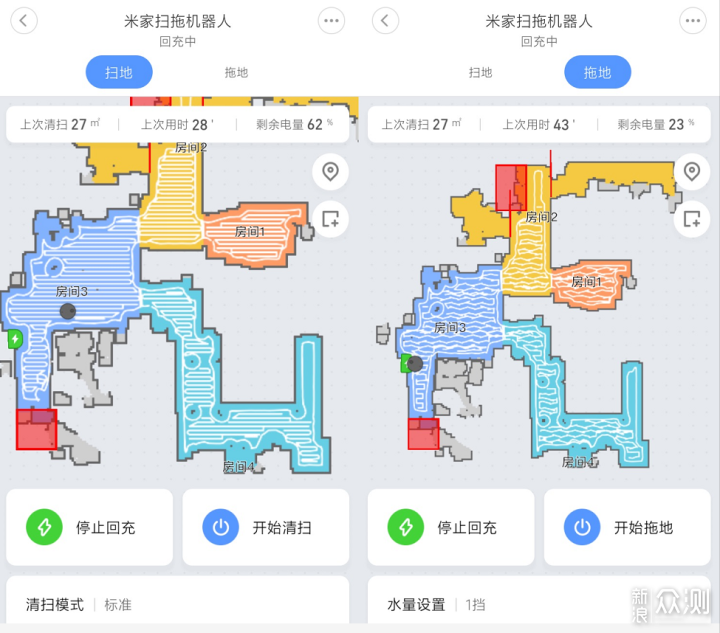
在地图都做了保存且电量都是100%以及我家27平米左右的清扫面积下,米2用了28分钟清扫完毕,T6用了24分钟(但T6计算是26平,加1分钟也无所谓,还是比米2快一点点),但电量使用差异可就太大了。米2清扫后只有62%的电了,消耗掉38%;T6还剩88%,只消耗了12%的电量。对于我习惯不让机器人每次都自动回充的人来说,米2一次充电只能完整清扫2次,而T6可以完整清扫6次之多(T6 20%电量时会自动回充)。
在使用拖地功能后,由于米2使用的是“人”字形拖地法,左右双向来回行走,耗电会进一步加剧。
加入拖地使用后,耗电由前面的62%下降到了23%,损耗掉39%的电量。
而T6之前在我测试的时候,用一档水量拖地,不过也就是从84%降到69%,区区15%的电量。
我家虽然100平出头,但杂物比较多,并且客厅中间还有一块孩子玩耍的4平米爬行垫,巨大的续航时间差异,让米2更适用于中小户型。150平米以上的使用米2就得悠着点了。拖扫效果测试:米2由于采用的是人字形专门的拖地模式,理论上效果会更好一些。对比我之前T6的拖地测试,T6单次行走的带来地面干涩的效果与米2没有实质上的差别。对于一些凝固的污渍,T6一样可以毫无压力的清除。
但米2由于需要专门使用不同的尘盒来切换两种清理模式,反而有些繁琐,并且别忘了米2在充电的时候是不能直接更换拖地组件的,这样再次增加一次操作。

拖地之前米2需要往二合一尘盒中灌水,由于水箱中间是尘舱,两边才是水箱空间,中间通过狭长的空间互联,所以多灌水的话,最好左右晃一下。水箱半身是带电控装置的,但是难免管子里面有残水,灌水后偶尔会从水箱出水孔渗出来一部分,下图中流出来的还不少。之前我已经提到,水箱后面就是风机,所以一定要小心别让水留到扫地机尘舱里。这比T6外挂水箱本身就可以远离风机的设计,米2需要更加注意。

之前做参数表的时候我没在米家以及有品官网上找到米2水箱容量数据,但咱们还是可以用称重法。空箱大概是262g,盛满水后435g,所以水箱容积大概173ml,比T6的140ml要多一些。不过前面说了水箱中间的狭长通道比较长,里面也难免会有空气残留。


第三次吐槽米2在充电时无法安装拖布组件,只能断充电后先把屁股扭过来,安装后再启动拖地。拖布目前没有提前沾水为全干状态,但不知道为何刚开始拖地时会甩出来很多的水滴,由于米2无隔水垫,在意的只能自己擦一下了。

米2在拖地时候的“人”字形还是很有特点的,不过这种倒退的步伐会不会让刚拖过的水进入风机舱呢?风机通常可是没有防水保护的哦。

米2一档的控水量对于我来说还是很合适的,比T6稍微少一些:

T6的一档水量对于我家的习惯则稍微多了一些:

而米家的2档水量对我家来说就有些大了。

所以我也就放弃了米2水箱3挡的使用测试。一档拖完地使用水量83ml,竟然与我之前测试T6完全一样的耗水量,看来虽然一档位单次路径下拖地水量比T6少,但是“人”字形的回拖使得耗水量最终和T6的一档不相上下。

虽然电控水箱可以让不拖地时水箱完全不出水,但毕竟无法彻底让拖布的残水不触碰在地板上,回充后马上取下拖布后,充电桩前面还是出现了可见的水痕。这时隔水垫的用处就体现出来了,但是米2是真没有啊。

吸力测试:开始没打算测吸力的,毕竟2100Pa与2000Pa只差了100Pa,属于同等级别的产品。不过前面提到米2的额定功率官方数据只有33W,差不多是1000Pa机型的额定功率,这对于最大吸力差不多但额定功率高达58W的T6来说简直有些太不可思议。

这倒是激起了我的好奇心以至于我怀疑米2到底是不是最大可以2100Pa的吸力。但我怀疑我的动手能力不足以拆掉两台机器具体观察风道设计以及各种电机耗电参数等信息,才让我想到了下面这种变相简测吸力差距的方式。我直接把尘刷以及尘盖拆掉,打算用手以及卫生纸对比看看尘舱吸气表现。为了更好的呈现这个效果,我用两个凳子搭建了下面这种测试环境,此时T6的尘刷已经卸掉。

结果T6报错了,原因是检测到轮子悬空,看来我只把防跌落传感器全部遮住是无济于事的。
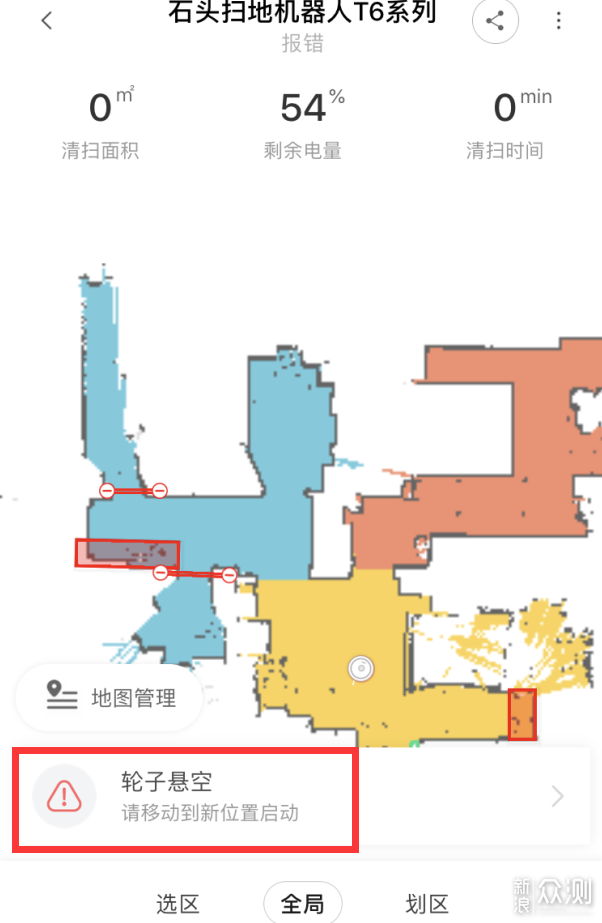
但米2同样的测试就非常顺利,因为它的轮子在悬空后还是可以工作,这是又少了一个传感器的节奏啊。极端情况下,比如米2掉进正好把轮子悬空的沟渠后,比如下图中的这种情况,米2会一直以为自己还在正常工作。这里有些诧异米2参数上说的是比T6少2种传感器,这里看怎么成了3种(沿墙,LDS顶盖压力以及轮子压力3种传感器)?也没看到说米2又增加了哪一种传感器,不知道这2种是怎么算出来的。

米2的两只动力轮悬空,不会出现任何报错,并且跑的还挺欢。

为此我得“处理”一下石头T6,不光把防跌落传感器全部遮住,轮架处也垫了一张厚纸,模拟轮子还有压力。

两款机器都调到最大吸力后从结果上看,两款机器的吸力没有明显差异,所以米2的吸力应该没有什么大缩水,之前的顾虑解除了。米2的吸力表现:

石头T6的吸力表现:

不过从这个测试看,扫地机器人的吸力对比吸尘器来说差距还是比较大的,毕竟一个是吸钢珠,另一个可以吸钢球的。测试到这里,我更倾向猜测米2 33W的额定功率可能不是最大档的额定功率数据。在之前耗电测试上已经可以看出部分端倪,比如3200mah的电池在米2上普通档位工作28分钟就耗掉了38%的电,对比T6 5200mah的电池24分钟耗掉12%的电,感觉好像差不多吧。物理好的可以算算,我物理不好就不献丑了。测试中发现的小插曲:这个小插曲来自下面拖地以及扫地过程中漂亮的路径图显示。从地图上看,首先路线非常规整,基本没有紊乱的现象,其次整套屋子空间填充得也非常丰满,几乎没有漏扫的痕迹。
但仔细一想,这路径图有些不对啊。首先按照米2“人”字形的拖地方式,路径应该是下面这种痕迹才对,不应该是哪种头尾相接的折线。
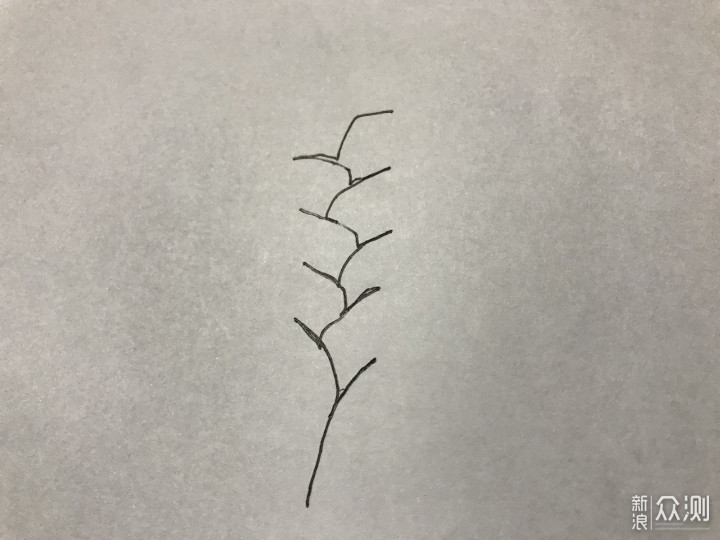
其次对比T6的路径图,由于机器人清扫完成一个区域后,需要由一个区域穿梭到另一个区域,以及拖扫完成返回充电桩都是大范围的直线快速移动,因此会有下面这种单条的穿梭直线路径出现。

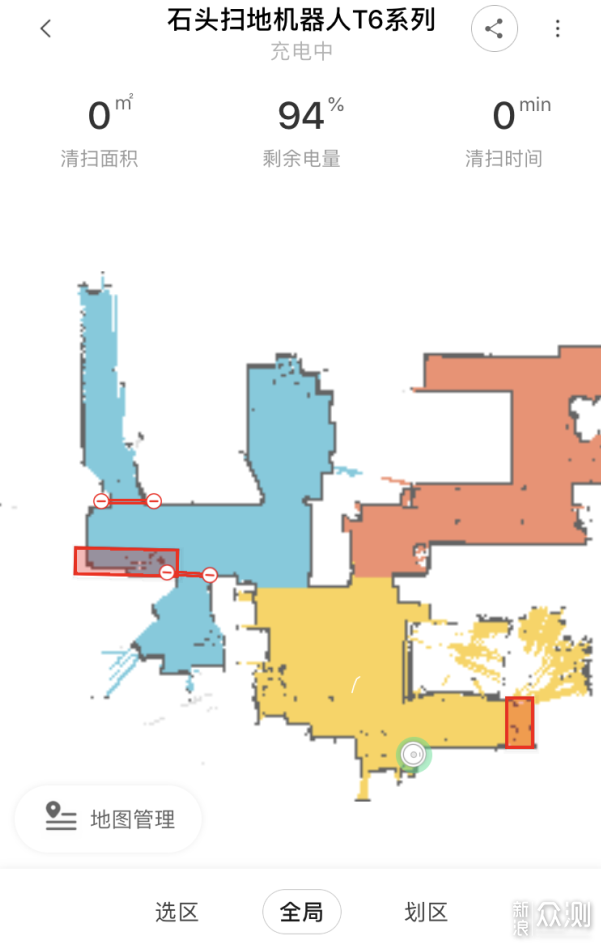
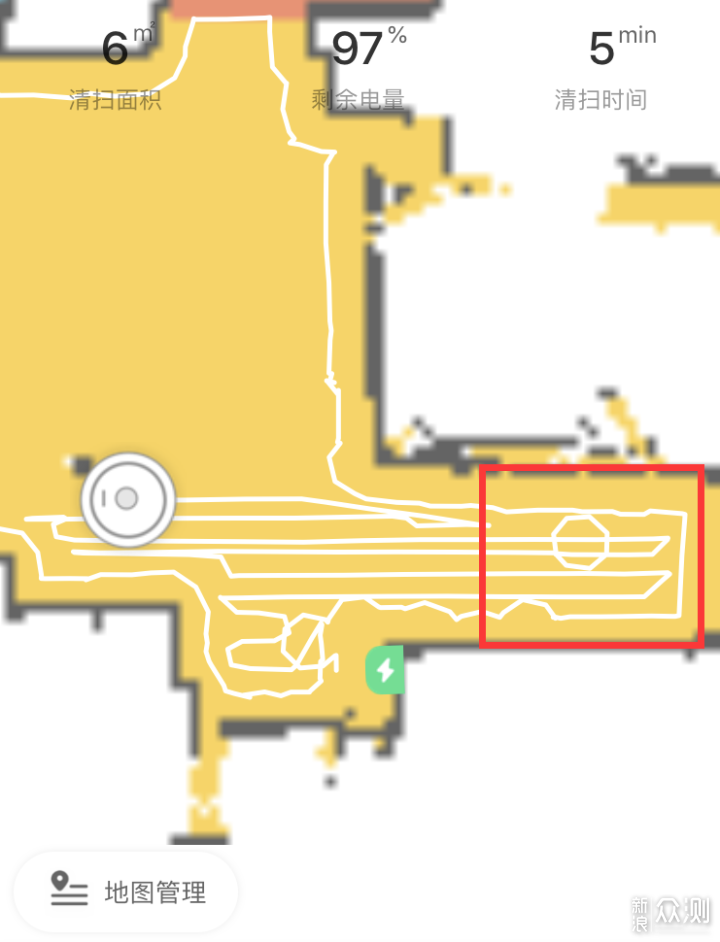
但米2的路径完全没有类似的路线,由于米2和石头T6都是先边框再内部弓字形行进。如果路径显示是准确的话,要么是路径导航太牛,牛到大区域返回都走弓形并且还是踏着原来的路回来的;要么路径与实际不符,是美化出来的。我又找了一张T6的路径图,回忆起红框处的特殊圆型轨迹是怎么来的。当时T6正在爬行垫边上清扫,结果在爬行垫玩的娃一乱动使劲,把机器人给掸下去了,最终T6被迫转了一个圈掉了一个头又重新爬了上来,由此看T6的路径应该是真实路径。
这也就解释了为何我的一些地图路径截图中米2之前显示还是不规则的路径,过一会儿看又变得方方正正了。
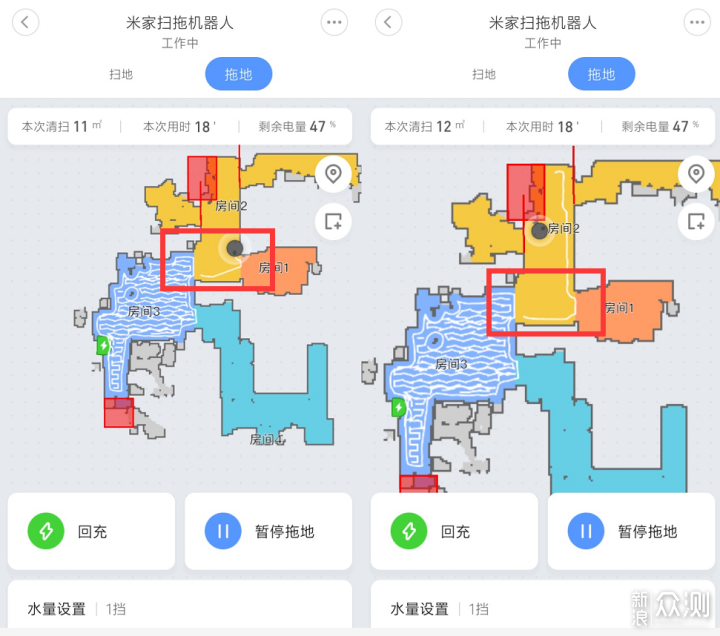
路径地图上还有一些不完整甚至是悬空的路径,应该是处理的水平不太够,又或者是记录不完整导致的吧。你们更倾向于哪种解释?

地图绘制本身应该是扫地过程查漏补缺的依据,为了好看而特意处理就没有必要了吧,这个脑洞大开的处理方式,又让我对之前一些扫地机看似不错路径的图片产生了同样的怀疑。
从上面的种种测试来看,所谓细节成就品质。米2对比T6,电池容量,充电功率,传感器配置,配件通用性等方面都有不同程度的缩水。米2拖地与扫地切换,还得更换尘盒以及断电安装拖布组件,略显不便。越障能力以及噪声控制方面也不如T6。T6脱桩重连和浮动尘刷既方便了使用又保证了清洁效果。除了上面种种使用上的差异,T6还支持10个定时清扫,而米2只支持一个,并且不能定时选区清扫。从各处的细节看会觉得T6对比米2¥500的差价绝对算是享受级的了。
如果说米2价格为¥1799的话,想选择售价2K以下的机器,我也更愿意选择¥1699的石头T4加第三方水箱组件补充拖地功能(这也是买石头的一个好处,普及率高,配件通用,所以第三方厂家也愿意加入到其他配件生产上),毕竟T4带有T6的很多技术,并且还是2年质保。
最后也总结一下好的拖扫机器人应该具有的通用特征,想买其他型号机器人的也可对比参考。
1.准确的智能的LDS激光+SLAM算法导航(智能机器人智能的关键部分).大吸力(吸尘效果的保障)&自动识别地面异物情况开启相应的吸力调整(比如地毯模式)
3.大容量电池(长续航的基础,大户型必选)&高功率充电桩(防止充电时等待较长时间),充电桩个头小点,但是带有内置变压和收线功能。
4.丰富的传感器配置(这里有时需要分清“种”和“个”的差异,比如T6是6个防跌落传感器,但这只是一种传感器,有的机器人写的24个传感器,但实际是几种那就又得单说了)
5.精确的地图路径绘制,不要为了秀而做
6.充电带有脱桩重连技术,还可以方便拆卸水箱以及拖布组件,并且最好配置隔水垫,毕竟水箱不出水拖布也不会立马就干。
7.浮动尘刷&浮动拖布
8.工作时低噪声
9.优秀的越障以及智能脱困能力(石头的机器人轮子越障以及尘刷力量太大,当碰到忘记在地上的线缆时,有时会卷进去造成线的损伤,这个能再智能判断一下就好了,比如说加入拖拽的力量传感器)
10.优秀的做工以及高品质元器件打造,质保时间越长越好
11.附带一些好玩的功能,比如更丰富的语音包,甚至可以选择边跑边唱“今天真是个好日子”。








 [北京]
[北京]
关注官方微博 微博
关注官方微信

Copyright © 1996-2025 SINA Corporation, All Rights Reserved 新浪公司 版权所有









