
香不香你说了算!360 X100扫地机器人首发评测
![]() 西红柿炖番茄70626
2021-02-20 17:59
西红柿炖番茄70626
2021-02-20 17:59
目前市面上主流的扫地机器人,主要采用两种导航解决方案:视觉识别系统和激光雷达系统。其中,激光雷达系统在建图精度和导航准确性方面又更具优势,是当下几乎所有品牌旗舰机型所采用的方案。


面对低矮的家具比如茶几、沙发,甚至床沿的时候,容易被卡住
扫地机器人还有两大克星,那就是小块的地毯和杂乱的插排

三目激光雷达矩阵
机身厚度大大减小
尘盒和水箱的体积
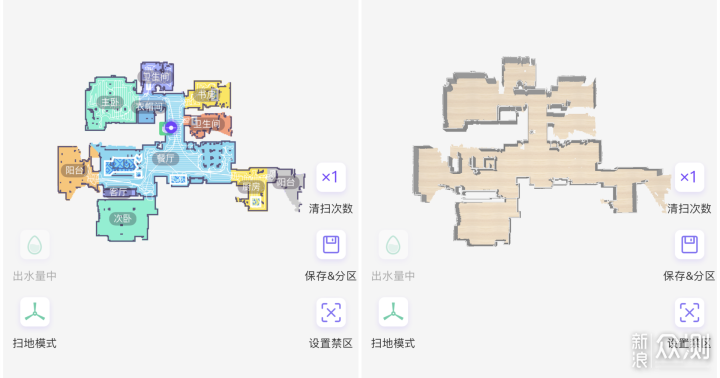
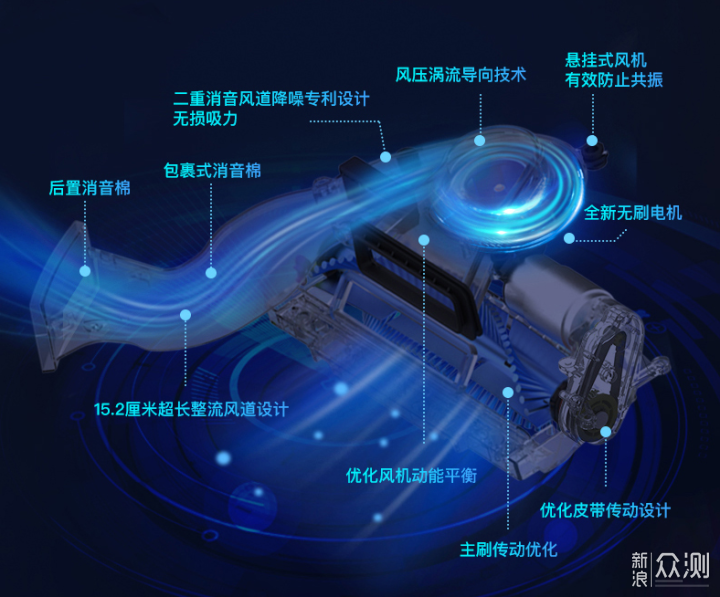
负压水箱3D立体地图吸力噪音


烤漆面板启动键和回充键


三目激光雷达矩阵LDS激光雷达OLS激光雷达

沿边传感器前向避障传感器

红外原理识别精度较低
视觉方案光线较暗处,识别效率会有所降低隐私泄露问题














悬崖传感器多达 6颗地毯检测传感器
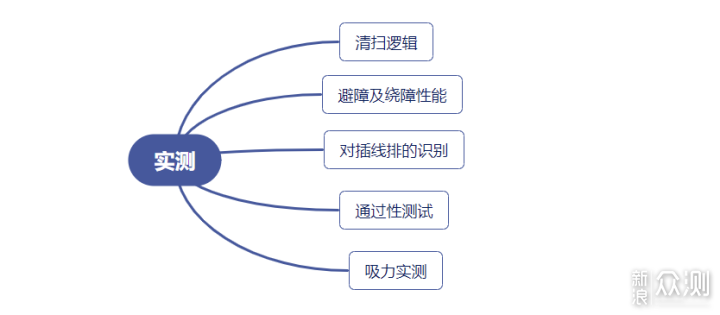
1、机器清扫逻辑;2、机器避障及绕障性能;3、机器对插线排的识别;4、通过性测试;5、吸力实测


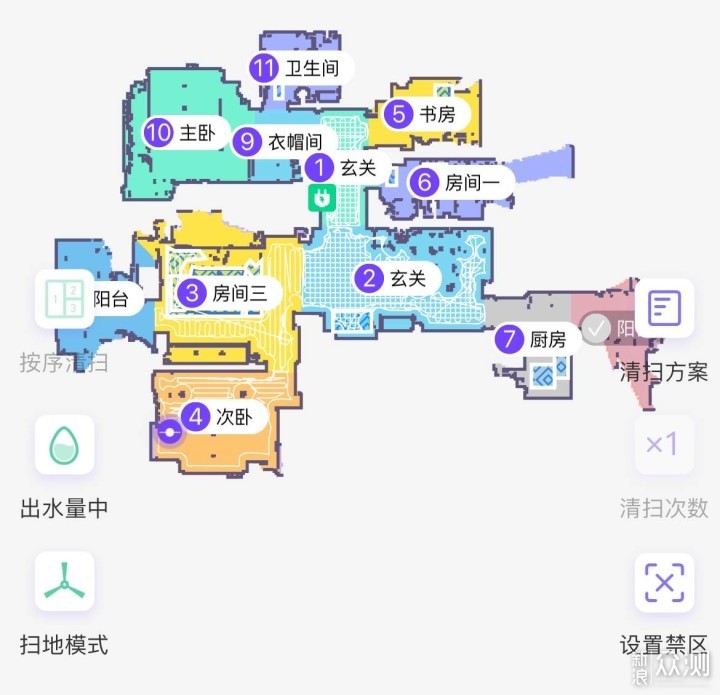
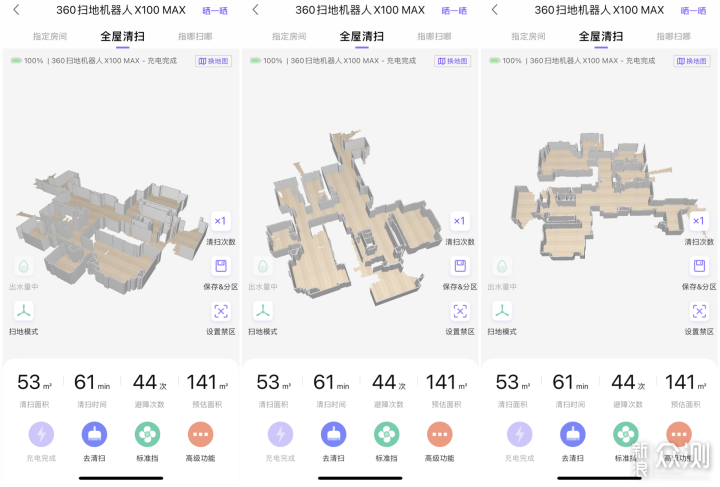
对面积估计最精准的扫地机
花费了 48min
只消耗了 14%的电量
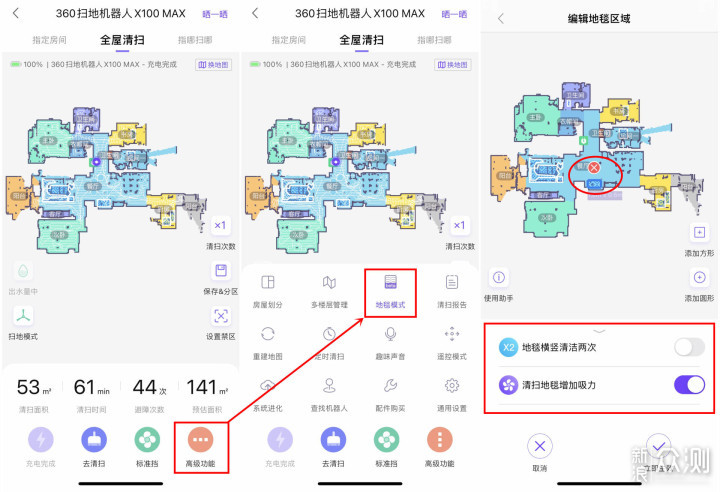
记录了家中探测到的地毯数量
首页-高级功能-地毯模式



从绕障技术上来说,也算是一个不小的进步




瓜子壳、整粒瓜子开心果壳





APP-我的-实验室
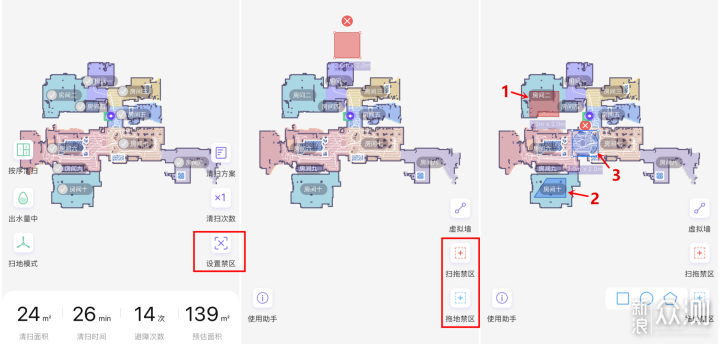
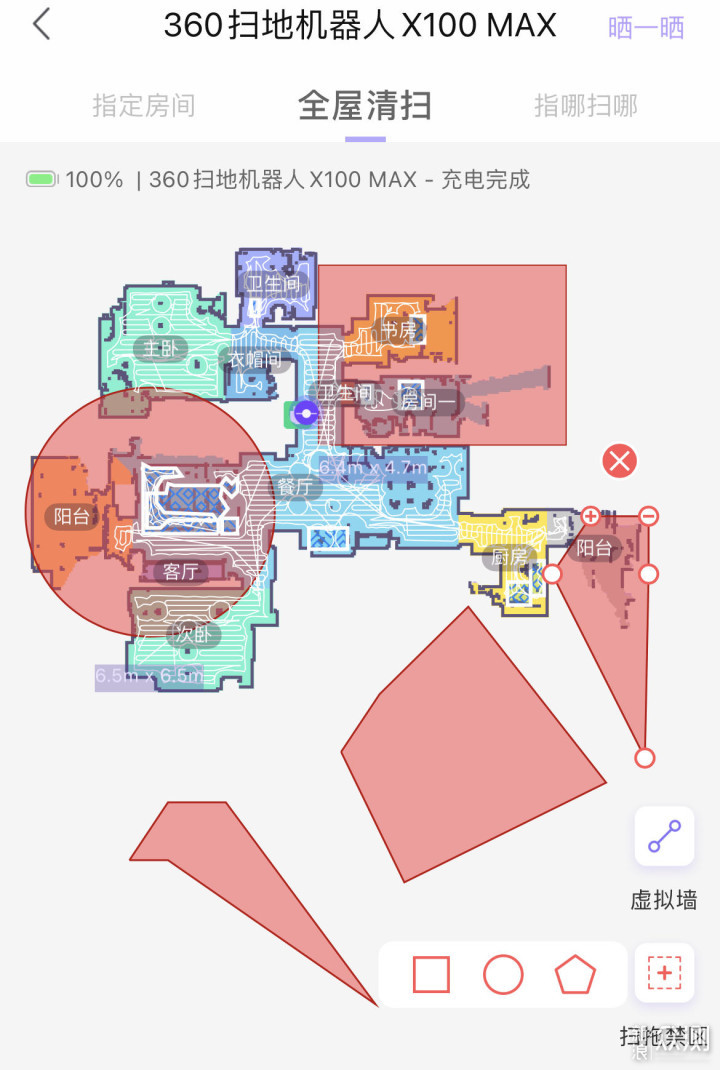
矩形圆形多边形

安静档、标准档、强力档和 MAX档

从无到有随机碰撞导航到主动导航
视觉识别系统激光雷达系统



关注官方微博 微博
关注官方微信

Copyright © 1996-2024 SINA Corporation, All Rights Reserved 新浪公司 版权所有






