
解放双手扫地僧——岚豹激光扫地机器人
![]() 祺鸽咕咕咕
2019-10-28 11:47
祺鸽咕咕咕
2019-10-28 11:47
1、功能多。2、精确地图构建,清扫效率高,覆盖率广。3、5200mAh大电池,续航足。4、自动避开障碍物,防跌落。5、智能音箱联动,使用方便。6、清扫故障App有提示,方便找出问题。
1、清洁刷和扫地机分离,容易丢失。2、对于3-4cm高度的落差识别较差,容易误冲,希望后续能通过升级固件优化。3、噪声偏大。4、未带拖地功能(蛮遗憾的)。
扫地机器人很早就听说了,但是以前的扫地机器人价格居高,让人望而生畏,后来各方加入战局,价格逐渐走低,看到这个价格才有了种草的希望。其实没有之前,看着广告加上自己的想象,觉得扫地机器人应该还是有很不错的应用场景的。今天也有幸从新浪众测大大这拿到了岚豹LAMBOT的激光扫地机器人,得以体验拥有一个扫地机器人给生活带来的变化。
因人在外地工作,租房条件有限,所以部分图片看起来可能比较昏暗,会显得比较脏,还请见谅。
全文主要分为以下几个部分:
开箱
产品细节
使用体验


▲打开盖子后看到3个区域:白色的LAMBOT,正方形、右边的长方形,LAMBOT内有说明书和一些注意事项。

▲全部拆开十分简洁,4个部件:扫地机器人、充电桩、电源线、清洁刷。

▲机器人全身以琥珀金为主色,用灰色的按键和Logo点缀,整体外观棱角比较分明,颇为硬朗。
因为是圆形,长宽346mm,高度在97mm,配有5200mAh的大电池保证续航,主机重量3.1kg。第一次接触的我感觉还是有点大,不过在试用过程也发生了一些个人觉得比较好玩的事。

▲主机仅有的2颗按钮:电源键和回充键,中间是WiFi指示灯。
2颗按键都有2种功能,长按和短按。电源键长按开关机,短按清扫或暂停;回充键长按定点清扫,短按回充或暂停。
WiFi指示灯有3种模式,慢闪、常亮和快闪,慢闪为等待连接,常亮是已连接,快闪是连接失败。
电源键自身也有指示灯:
白色:电量大于20%;
红色:电量小于20%;
呼吸闪烁:充电中;
红色快闪:故障状态。
▲开机
初次使用需要连接WiFi,因此需要同时按下电源键和回充键3秒达到重置WiFi的目的。

▲打开主机翻盖可以看到尘盒。

▲尘盒靠近掀盖口处有颗小小的系统重置键。

▲取出尘盒可以看到尘盒边有高效滤网。

▲机身尾部有扬声器和排风口,中间是充电电极,为5200mAh的大容量电池充电。
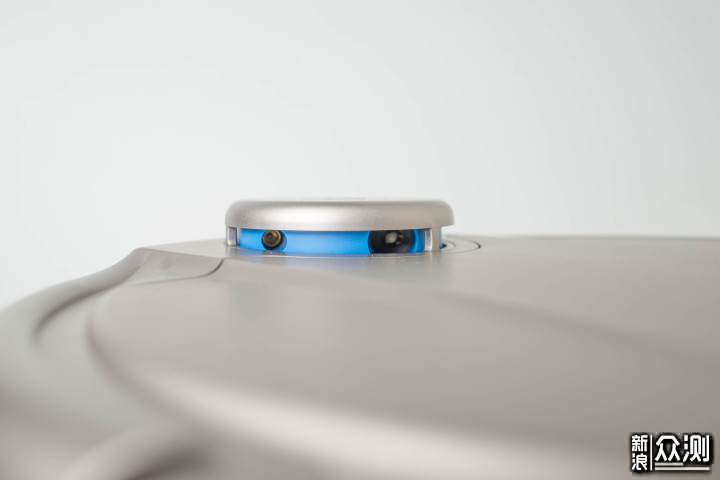
▲拥有61项专利,全面应对各种环境、稳定测距、准确建图、可靠性更高的专利LDS激光雷达,结合SLAM算法更加智能。

▲12米的扫描半径,射程远、频率高,更精准。

▲超声波传感器
准确配合激光雷达准确判断障碍物的远近和大小。

▲沿墙传感器

▲悬崖传感器

▲万向轮
▲旋转和滚动比较顺滑

▲边刷
共有2个,与其他单边不同,岚豹就是要告诉你:我全都要!

▲滚刷和滚刷罩
滚刷罩是卡扣式
▲整个拆卸过程还是比较流畅的,用时12s。
▲滚刷的固定是通过两边的正方形放入滚刷槽两侧的方形孔进行固定。

▲安装过程需要对准孔位,用时和拆卸差不多。
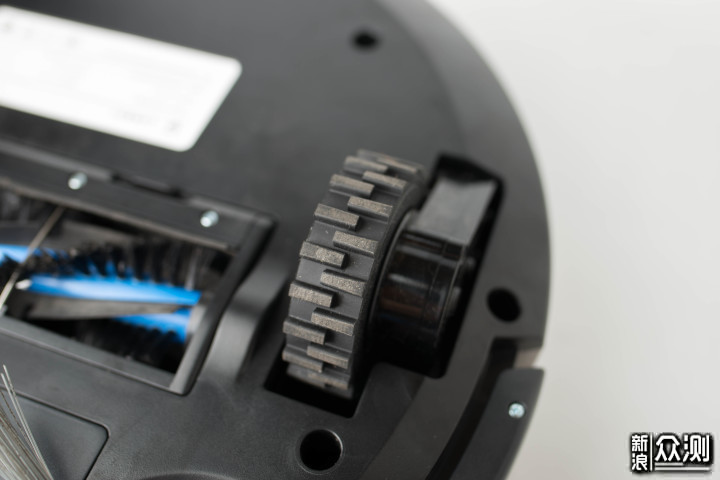
▲驱动轮
底部的驱动轮使用齿轮式,外部材质能够防止打滑,提高行动效率,不过如果卡在床底要拖出来就比较头疼了,个人试过徒手推,还是需要费点力的;较高的高度也为机器人越障能力提供保障。

▲充电桩
充电桩的主色调和主机的色调保持一致,体积不算大:134*240*90mm。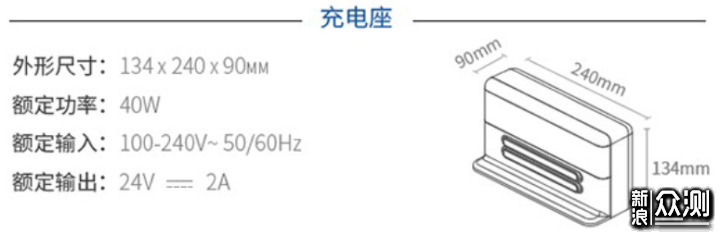 ▲40W的功率保证充电速度,扫地机也不会一整天都在运行。
▲40W的功率保证充电速度,扫地机也不会一整天都在运行。

▲个人觉得设计比较巧妙的理线空间。

▲可以通过不同的绕法减少或增加露在外部的线。

▲盖上盖子即可隐藏多余的线。

▲充电时的整体状态。

▲电极接触充电。

▲清洁刷
有3个主要功能:清扫灰尘的清洁刷、顺毛抓手、割丝刀片。个人觉得还是十分实用的,特别是刀片,老婆的头发掉的到处都是,每次清扫完滚刷都缠了几圈头发,直接用刀片割掉,扯一扯头发就掉下来了。
拿到手的时候还不知道怎么办,直接看看说明书对扫地机器人有一个大概的了解,把充电桩放好机器人放好之后,开始下载岚豹App。
下载方式可通过扫描说明书中的二维码或者在App Store搜索“岚豹”。

▲下载完成后出现岚豹App图标,点开之后是正常的注册登录,选择添加新设备后提示要按住设备电源键和HOME键,直到听到设备语音报告重置成功。
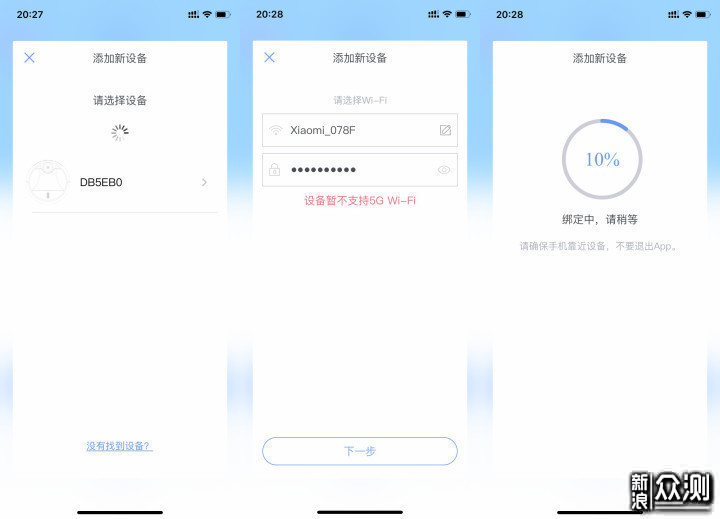
▲点击下一步出现设备,选择连接WiFi。
 ▲绑定成功,返回列表出现扫地机器人,进入后会有各个banner的功能介绍。主要显示:状态、清扫面积、工作时长、剩余电量以及清扫按钮。点击扫地机可进入操作页面(最右图)。
▲绑定成功,返回列表出现扫地机器人,进入后会有各个banner的功能介绍。主要显示:状态、清扫面积、工作时长、剩余电量以及清扫按钮。点击扫地机可进入操作页面(最右图)。
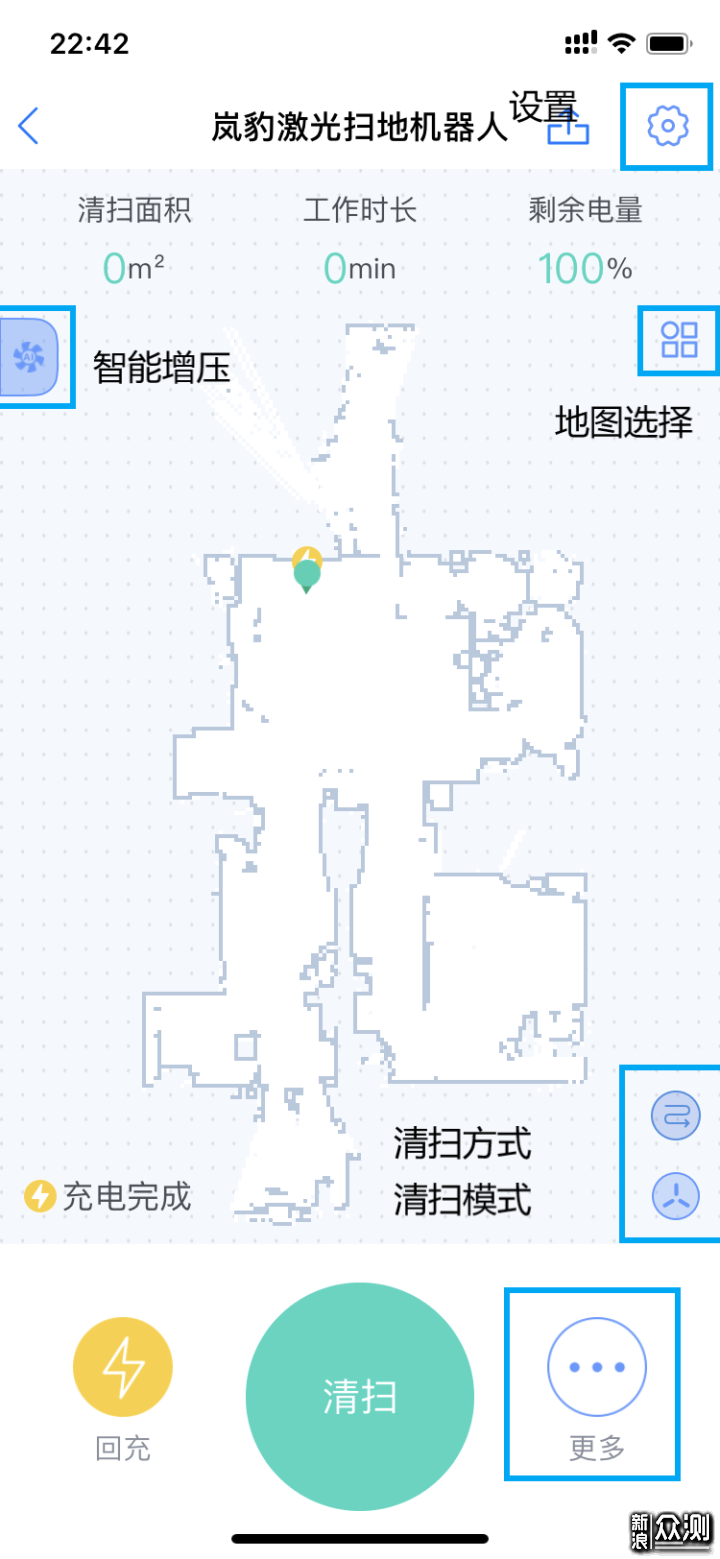 ▲操作界面
▲操作界面
分为智能增压开启提醒、设置、地图选择、清扫方式、清扫模式。
设置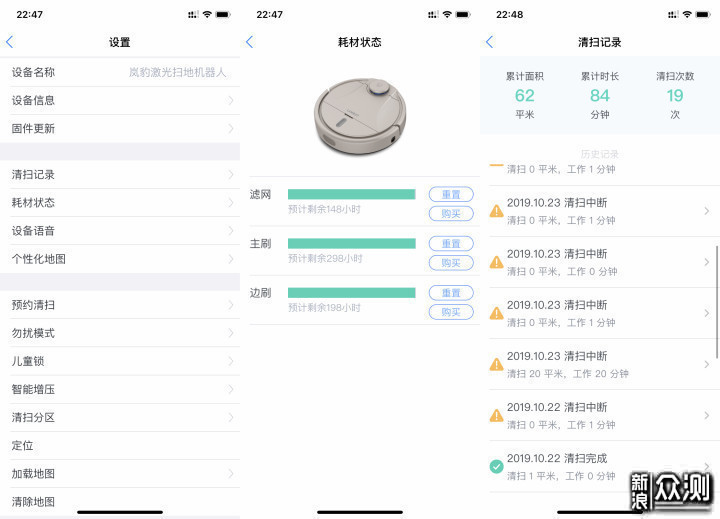
▲在设置中可以看到清扫记录、耗材状态、预约清扫、勿扰模式、儿童锁、清扫分区等banner。
比如耗材状态,可以看到滤网、主刷、边刷的预计剩余时间,右侧提供购买选择。
比如清扫记录,可以看到累计清扫的面积、时长、次数,点开记录可以看到清扫过程动图。
清扫动图
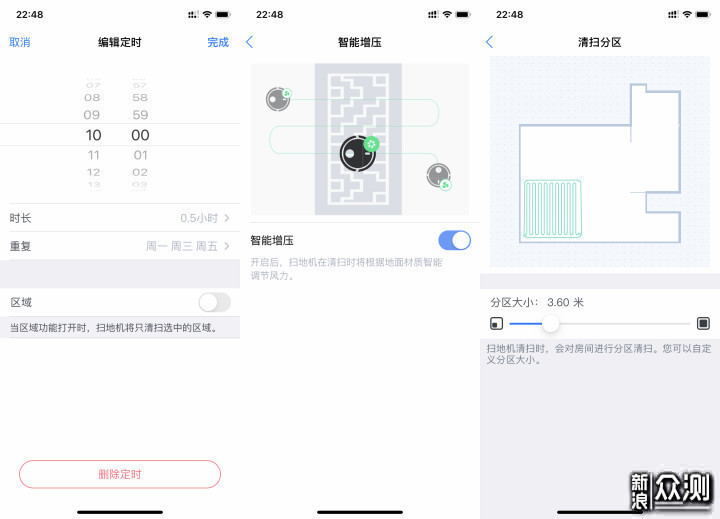
▲预约清扫功能可选择时间、时长、重复、区域。
▲智能增压是自动识别地面材质调整风力。
▲清扫分区是调节分区的大小。
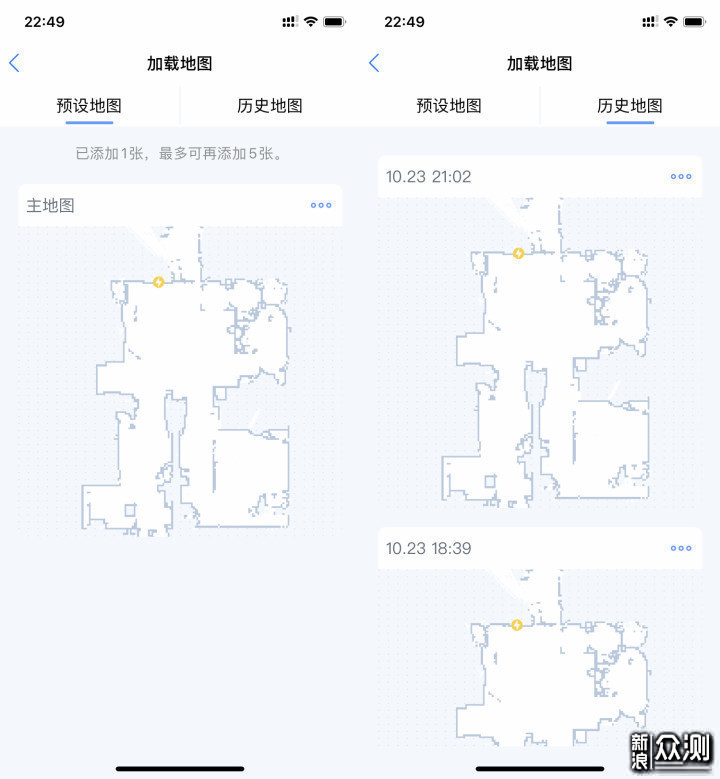
▲加载地图中有预设地图和历史地图。
预设地图是没有的,可以通过历史地图进行设置作为主地图。
地图选择
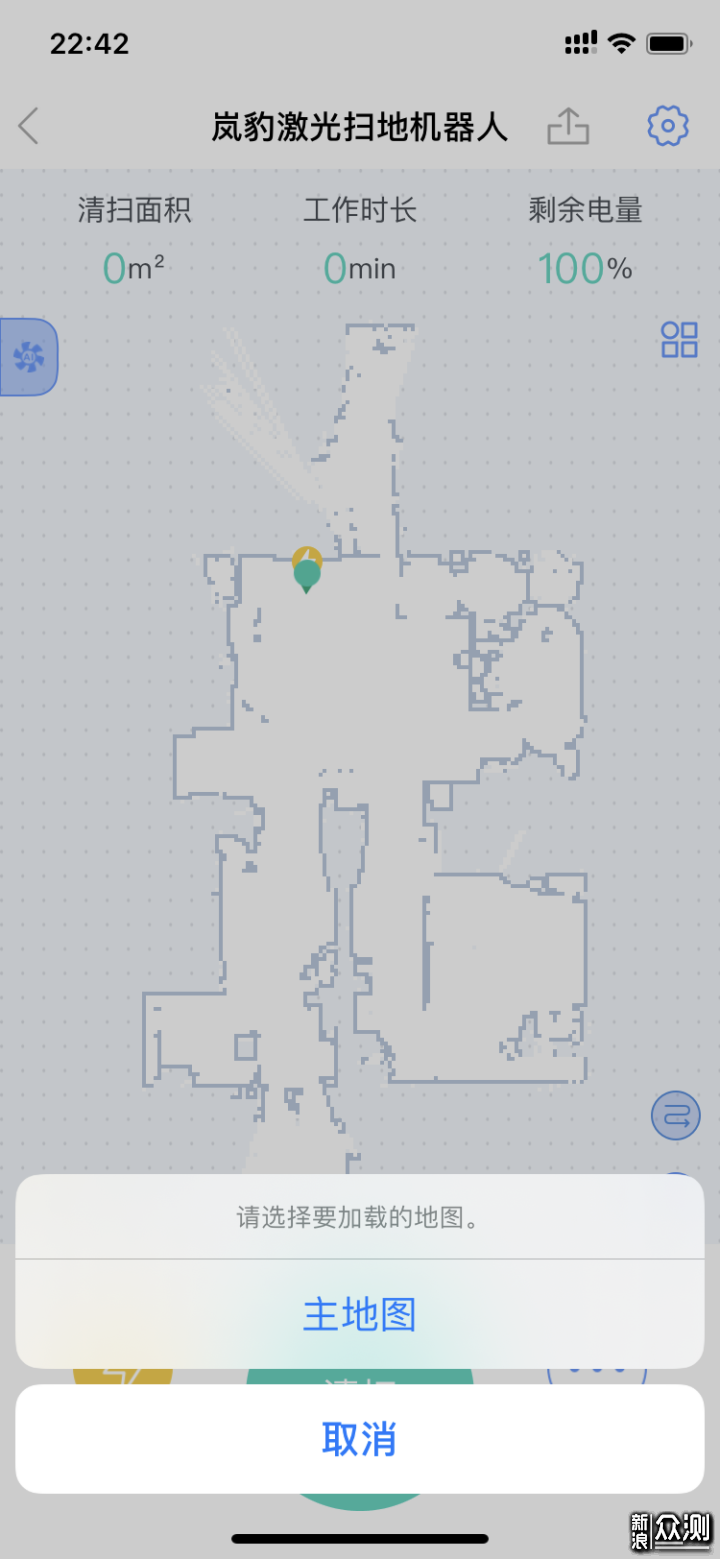
▲地图选择和预设地图相关联,如果家里有2层,或者1层分多层,就需要清扫不同的层,形成不同的地图,后续选择地图进行清扫。
清扫方式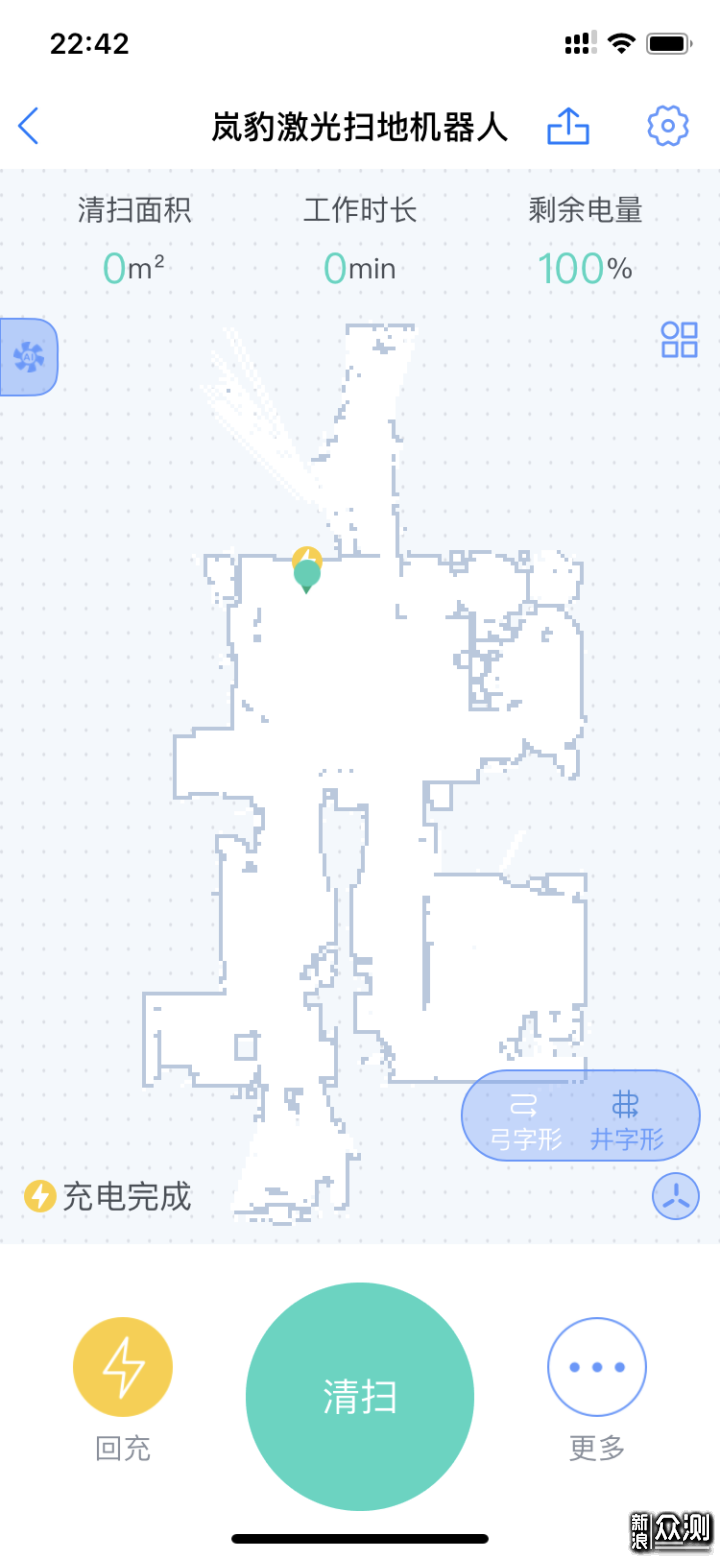 ▲清扫方式有2种:弓字和井字。
▲清扫方式有2种:弓字和井字。
井字相当于在弓字基础上将弓字旋转90°再对相同区域进行清扫一遍,清洁效果更优,但是时间更长。
清扫模式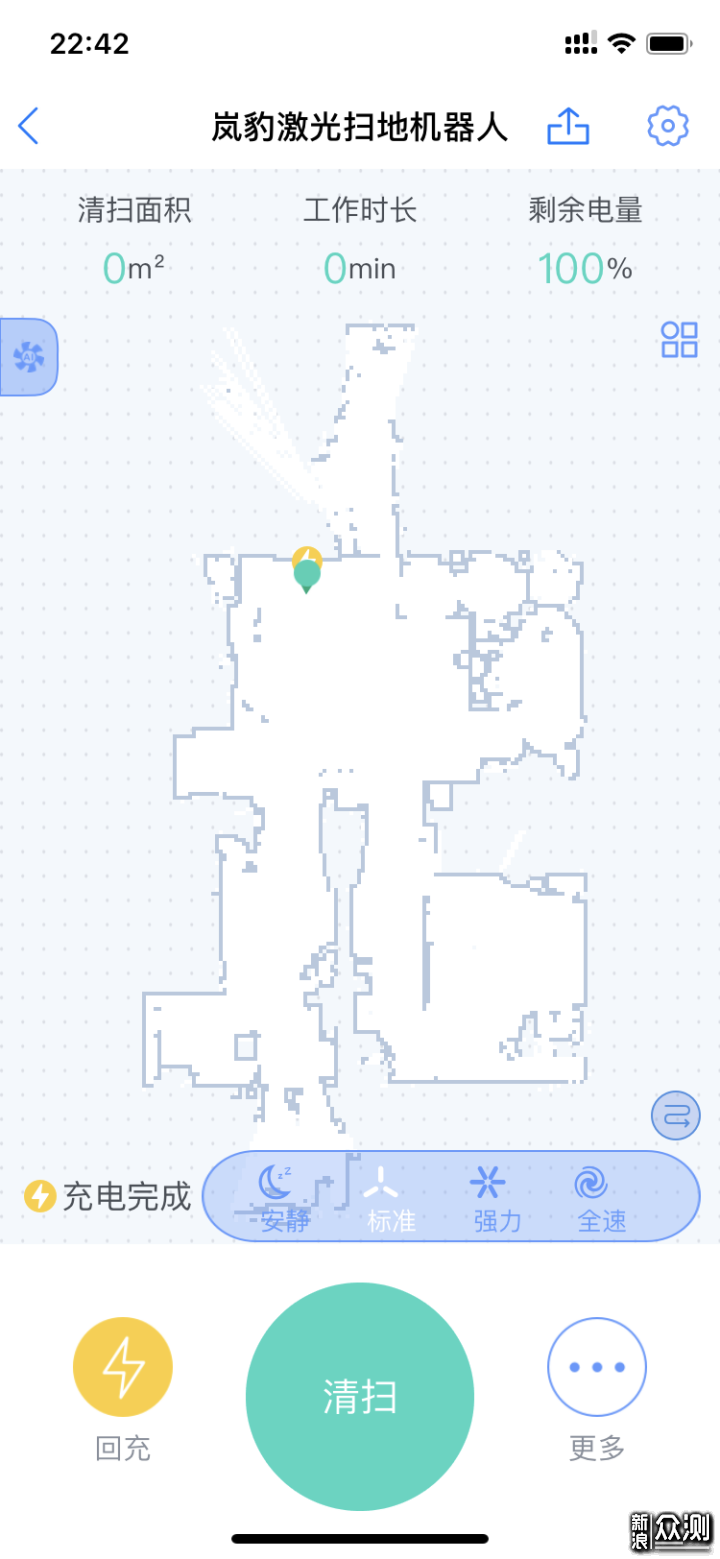 ▲清扫模式有4种:安静、标准、强力、全速。
▲清扫模式有4种:安静、标准、强力、全速。
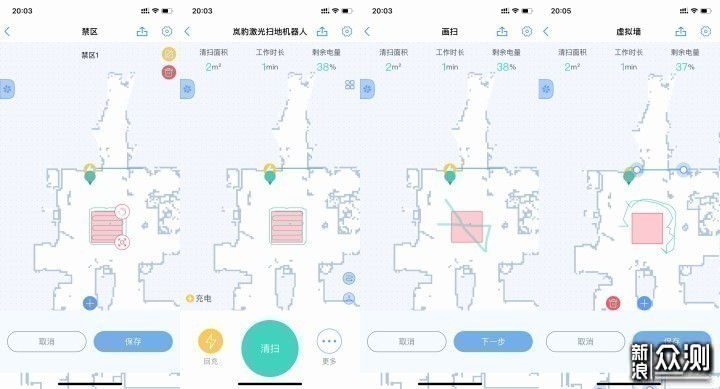
更多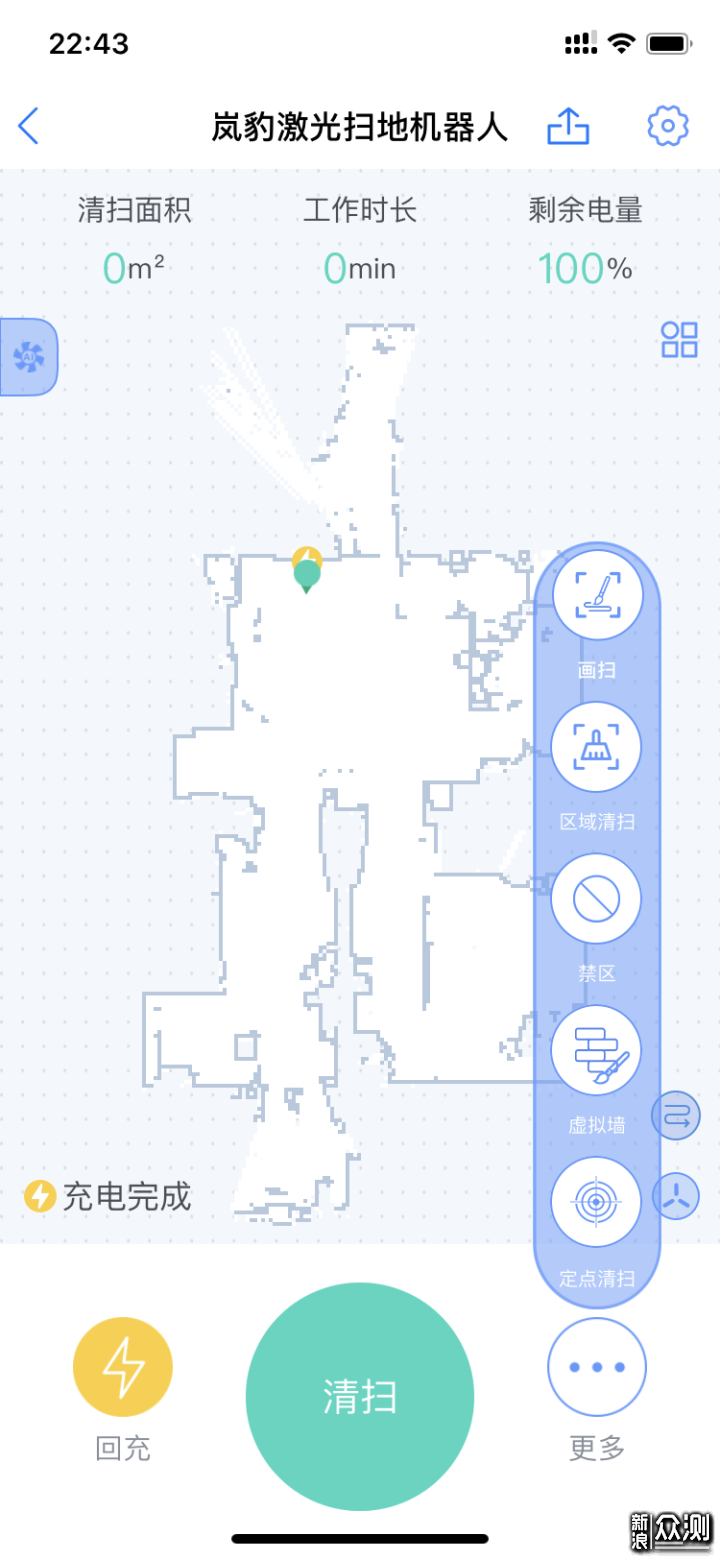 ▲更多提供了更多的功能:画扫、区域清扫、禁区、虚拟墙、定点清扫。
▲更多提供了更多的功能:画扫、区域清扫、禁区、虚拟墙、定点清扫。
画扫

▲点击画扫,下部有2个圆形图标,1个是添加图片,另一个是手动画线。画一个爱心,扫地机就能随着线走。
区域清扫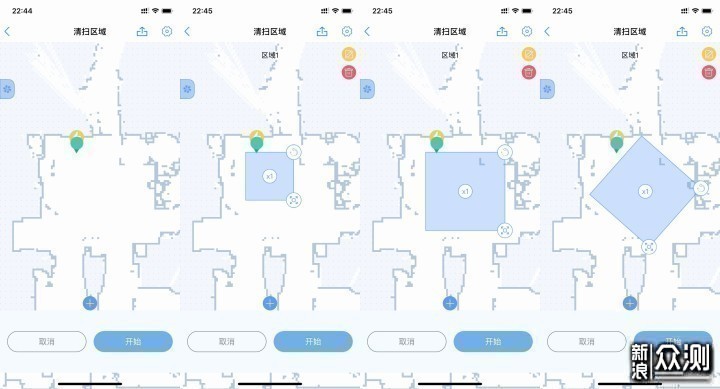
▲区域清扫,点击+号出现一个正方形区域,可调大小和旋转方向,机器人会在区域内清扫。
禁区
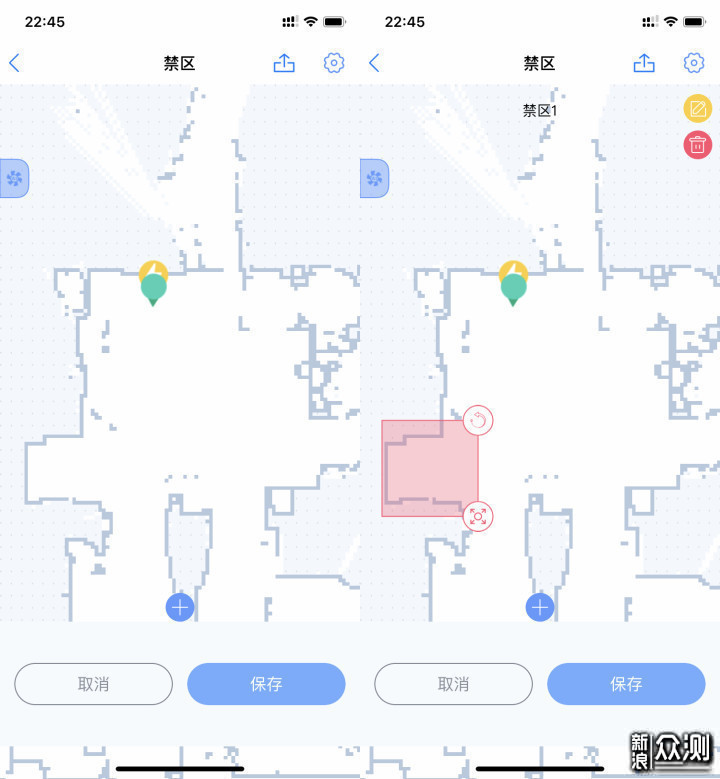
▲禁区,点击+号和区域清扫一致,不过颜色变成红色,保存后该区域机器人清扫过程不会进入禁区。
虚拟墙
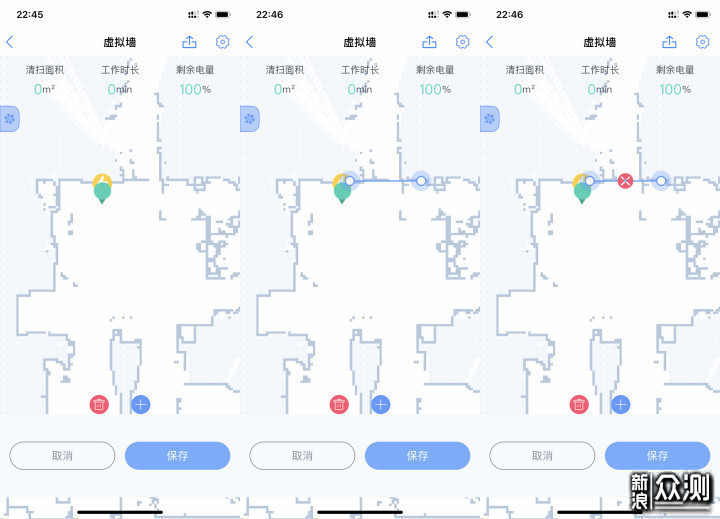
▲虚拟墙则为1根线,点击+号出现线,两头可以调节长度和方向,点击删除虚拟墙上出现红叉删除。
定点清扫
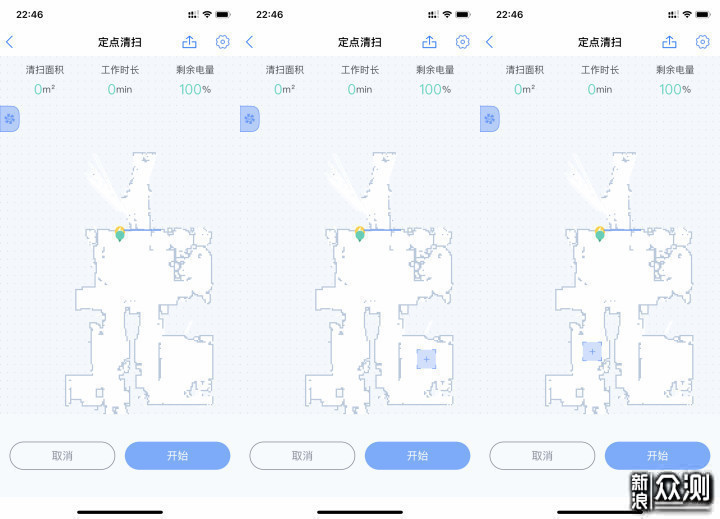 ▲定点清扫出现地图,任意点击地图出现小正方形,开始即到达小正方形中心开始清扫,走回字。
▲定点清扫出现地图,任意点击地图出现小正方形,开始即到达小正方形中心开始清扫,走回字。
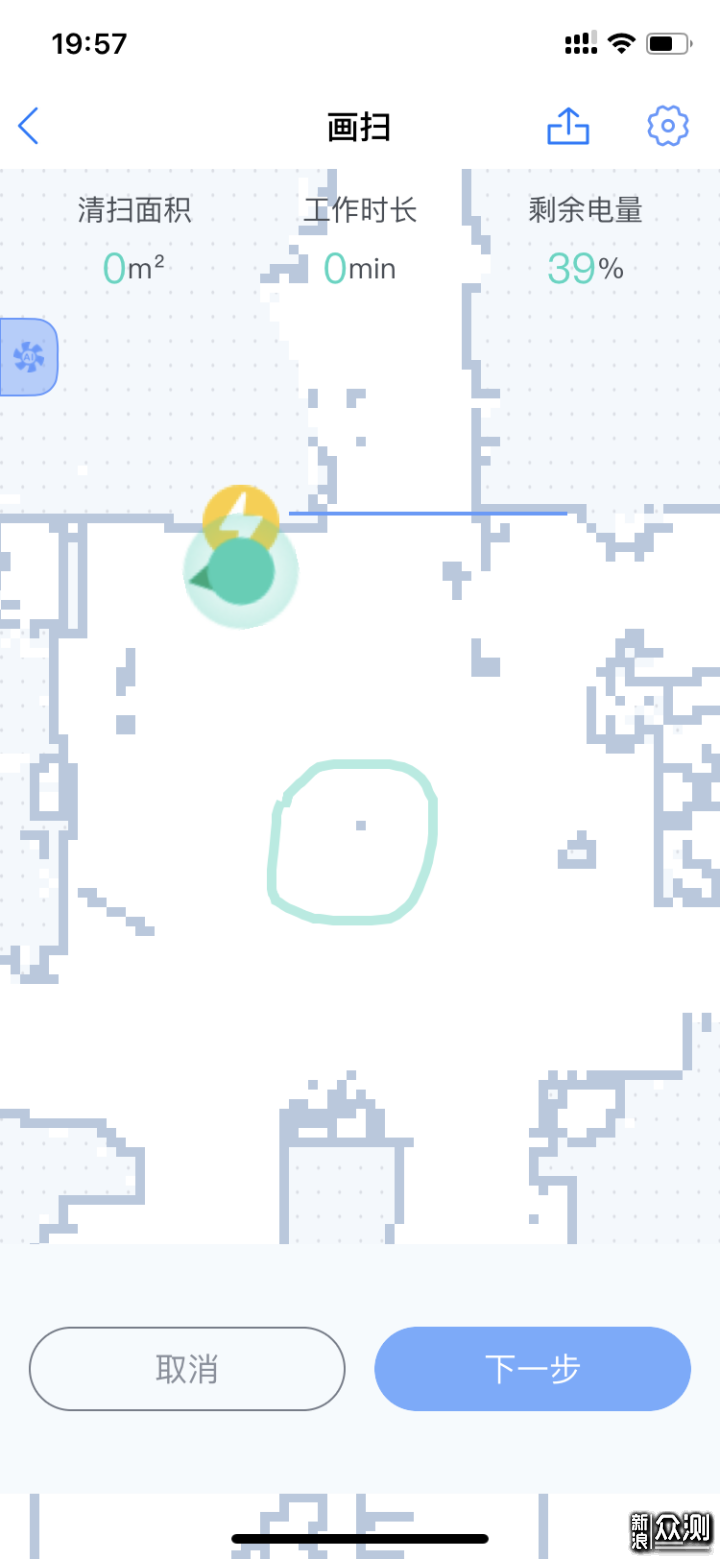
▲在地图中画个圈。

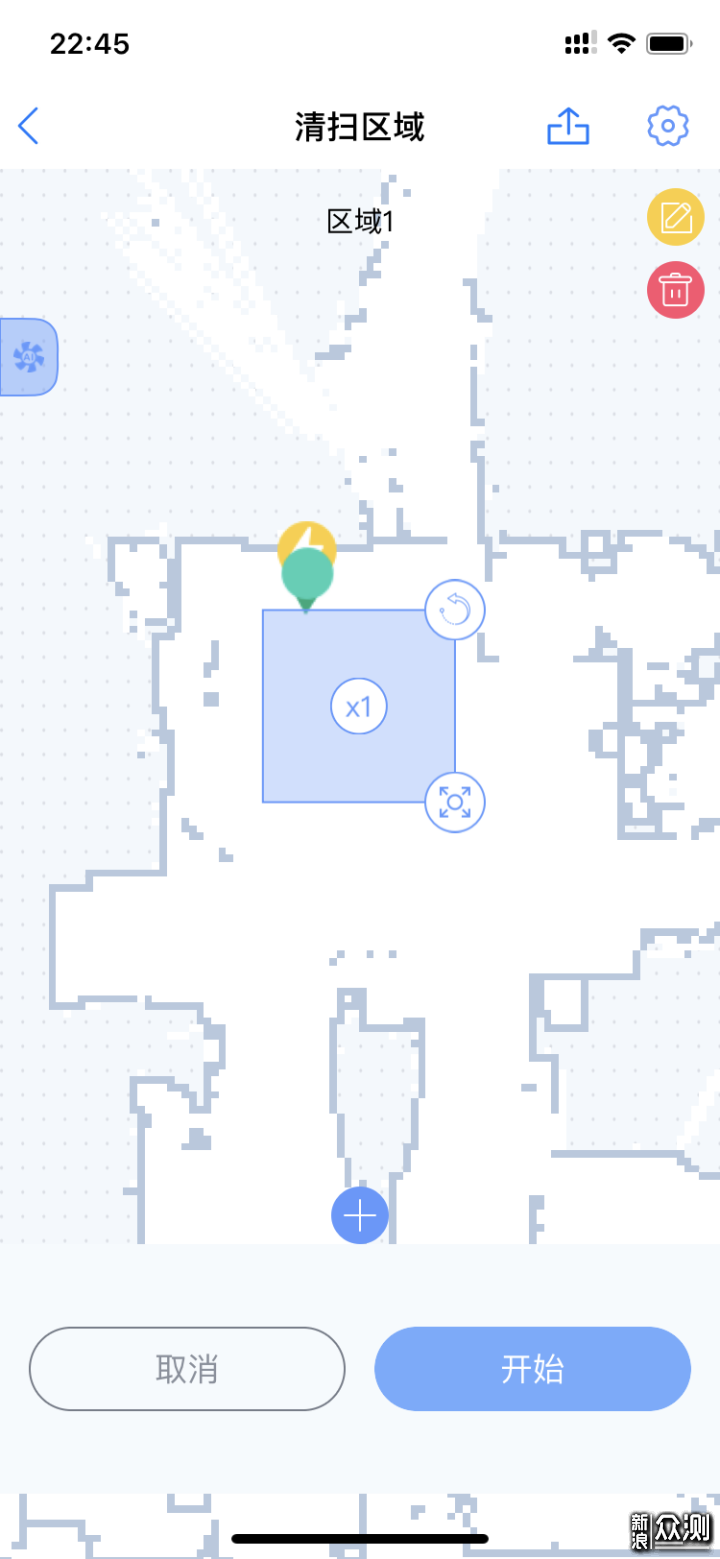
▲区域清扫,画好框后点击开始即可。

▲机器人会在区域内沿边走一圈,然后在圈内弓字行走进行清扫。
▲禁区测试,绘画禁区→确认→使用画扫穿过禁区→实际运行轨迹。

▲虽然线条穿过禁区,但是机器人没有走在进禁区,而是沿着禁区周边完成禁区外的清扫任务。
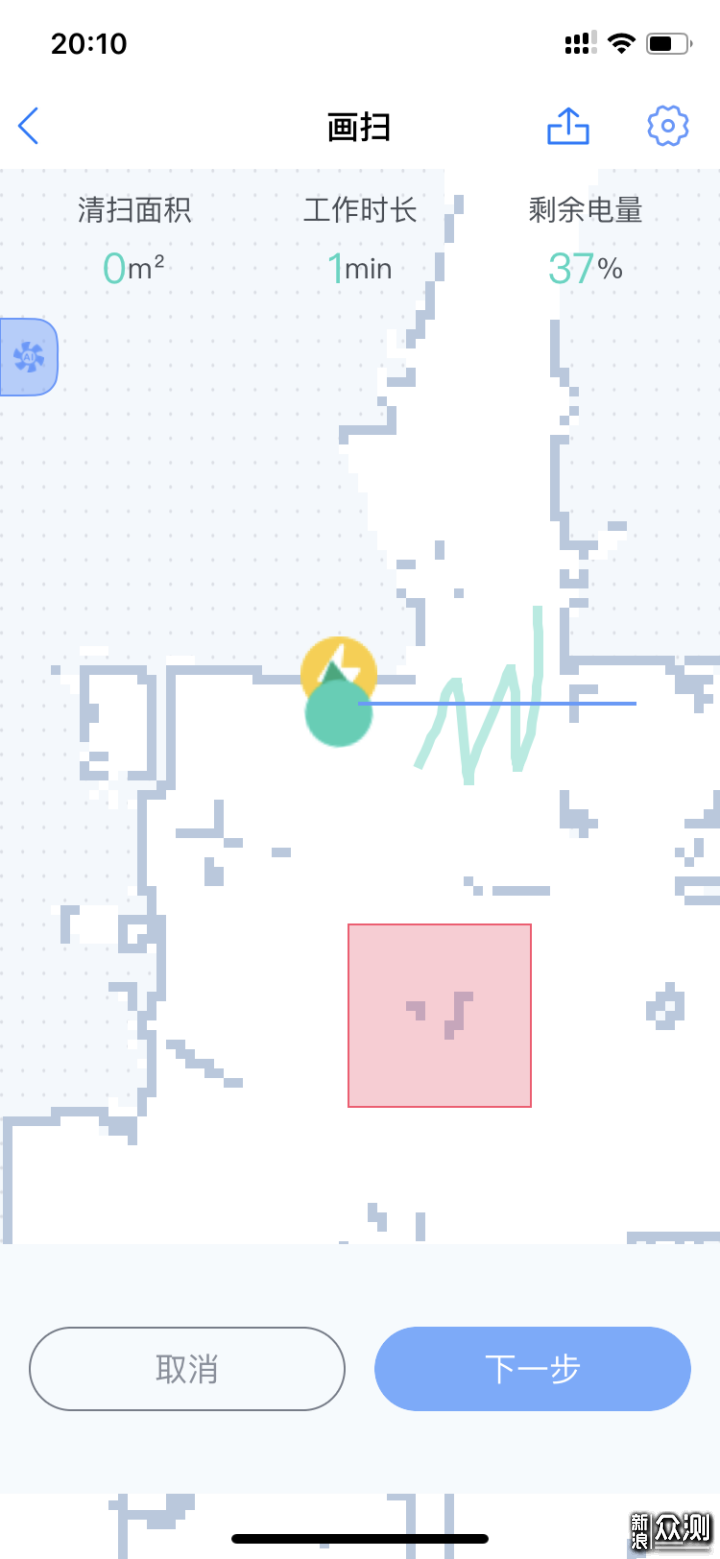
▲在虚拟墙周围画扫。

▲虽然画线通过了虚拟墙,但是扫地机器人未穿过虚拟墙,而是在墙边反复横跳。
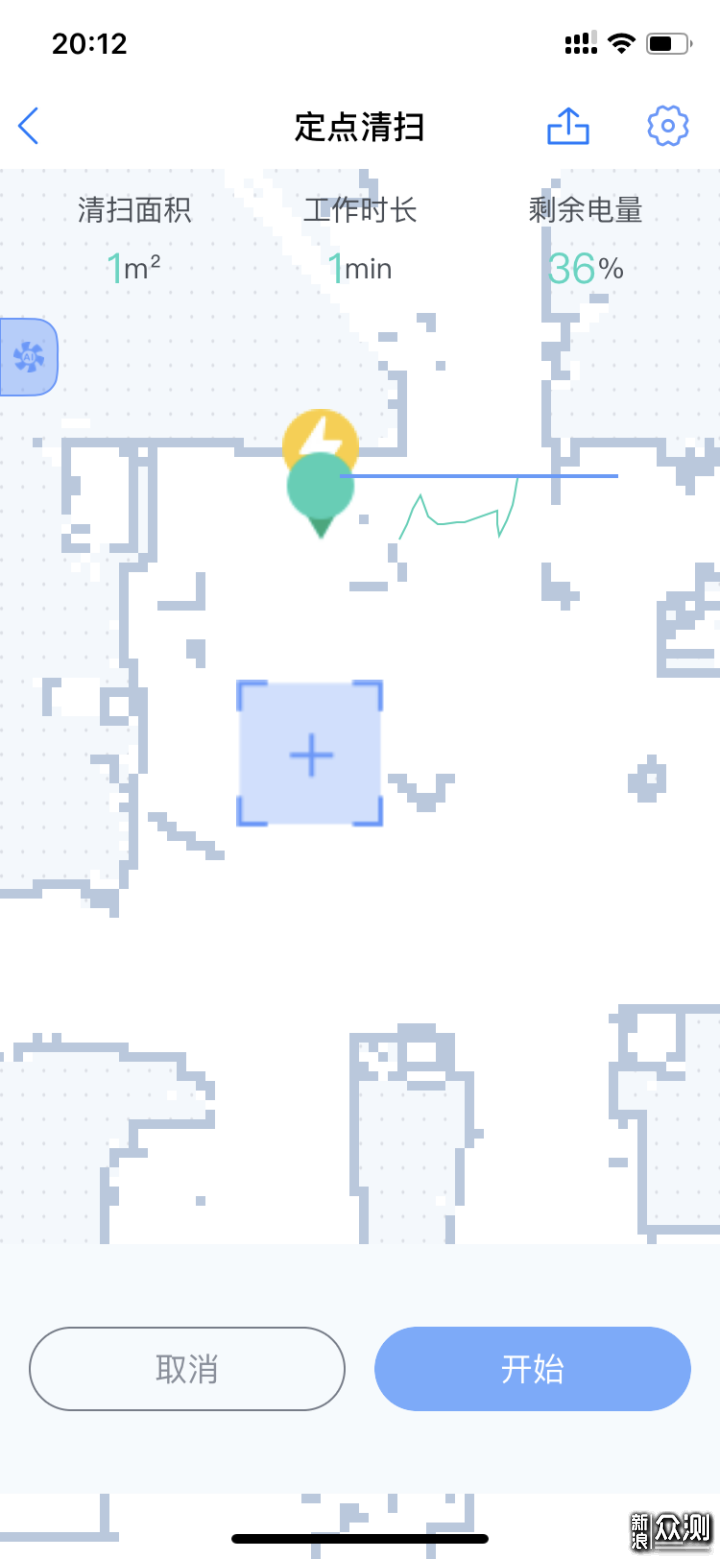
▲任意选择,然后点击开始。
▲回字清扫
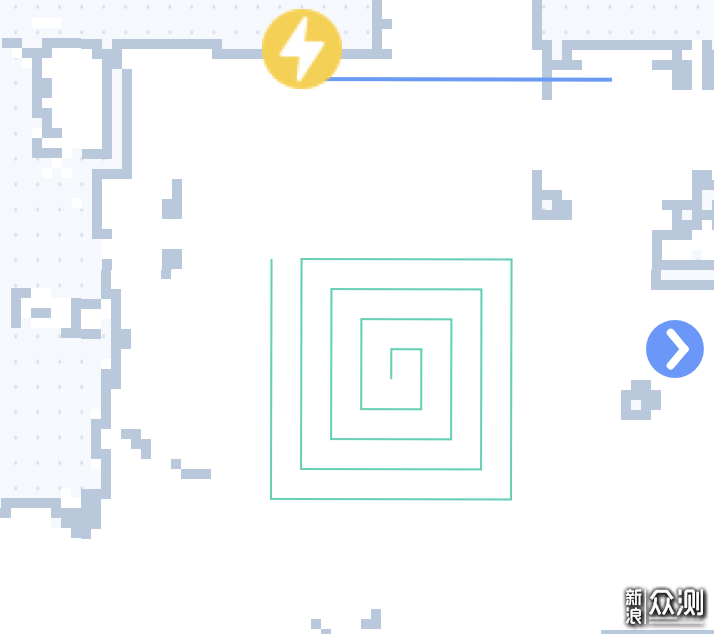
▲最终形成的线条

▲清扫结束后会自动回充,以及如果家里面积很大的情况下,一次满电无法清扫完全,扫地机会在电量20%的时候自动回充,回充结束后回到上次清扫未结束的地方继续清扫,实现断点续扫的功能。
不过5200mAh,标称3小时续航,适用300平米面积,一般户型基本上能一次扫完吧,除开那些扫起来像打仗一样的可能比较耗电,比较平坦的、障碍少的情况下应该还是能够达到的。
我现在租的房子两房一厅,面积不大,摆的东西也很多,所以实际清扫的面积还是很小的,大概20-30平米,所以5200mAh的电池完全能够满足使用需求。
▲井字清扫相比弓字多了一边,增加了与弓字垂直的走法,清洁能力加倍,但是清洁时长增加。

▲刚好家里有一个小爱音箱。
说明书没有对如何连接音箱进行介绍,所以这里简单介绍一下如何使用小爱同学连接岚豹激光扫地机器人。
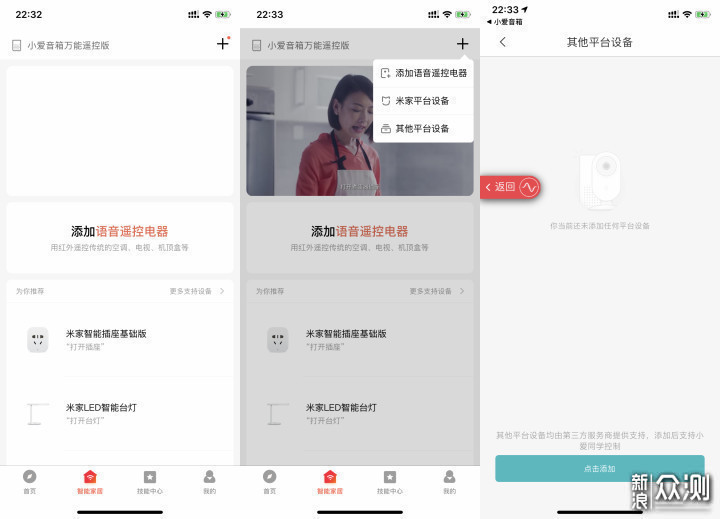
▲打开小爱音箱App→进入智能家居banner→右上角+号添加其他平台设备→点击添加。
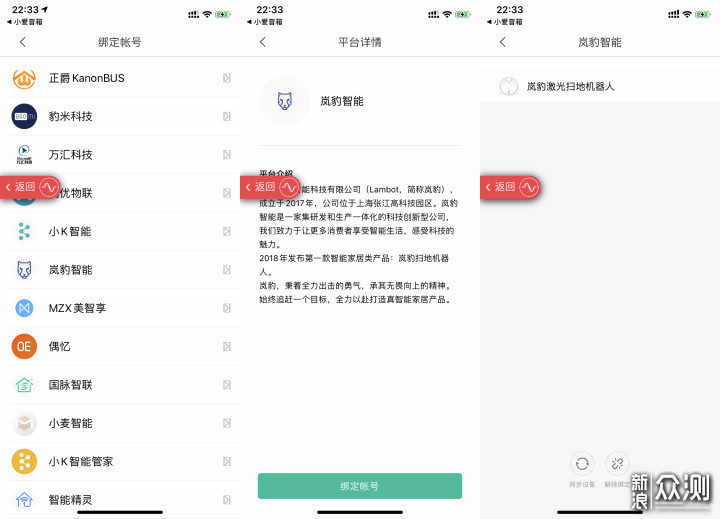
▲需要绑定账号→找到岚豹智能→绑定账号→输入账号密码→看到岚豹激光扫地机器人→点击同步设备。
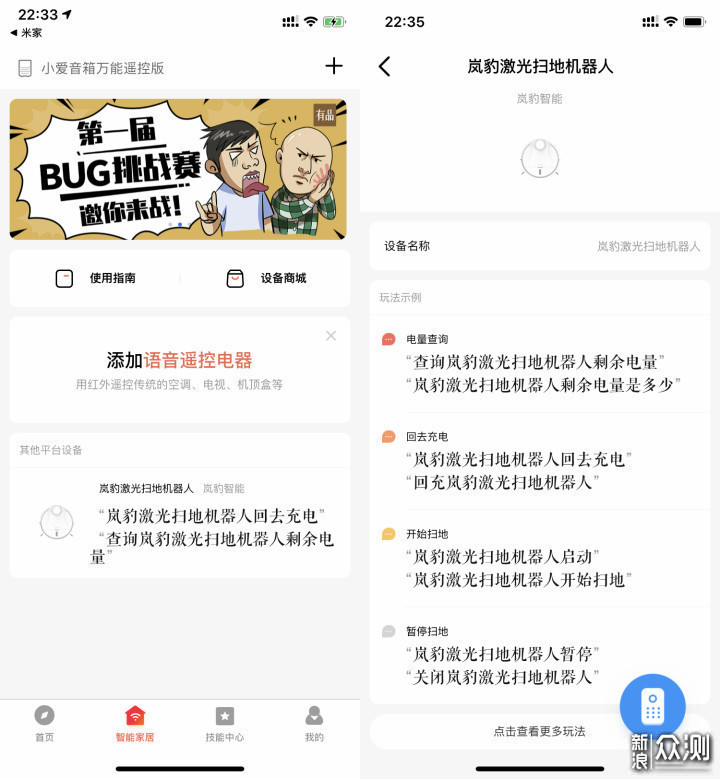 ▲在智能家居banner下能看到机器人,点击可看到玩法示例,比如查电量、扫地、回去充电。
▲在智能家居banner下能看到机器人,点击可看到玩法示例,比如查电量、扫地、回去充电。
个人尝试了一下:查询剩余电量、扫地机器人启动和回去充电,都能识别并行动,感觉这种智能家居的联动还是很有意思的,不过设备名称太长了,似乎还不能简化和修改,可能是我没找到入口。
▲岚豹对高度的识别还是可以的,通过底部的悬崖传感器,有效识别高度,立马缩回。
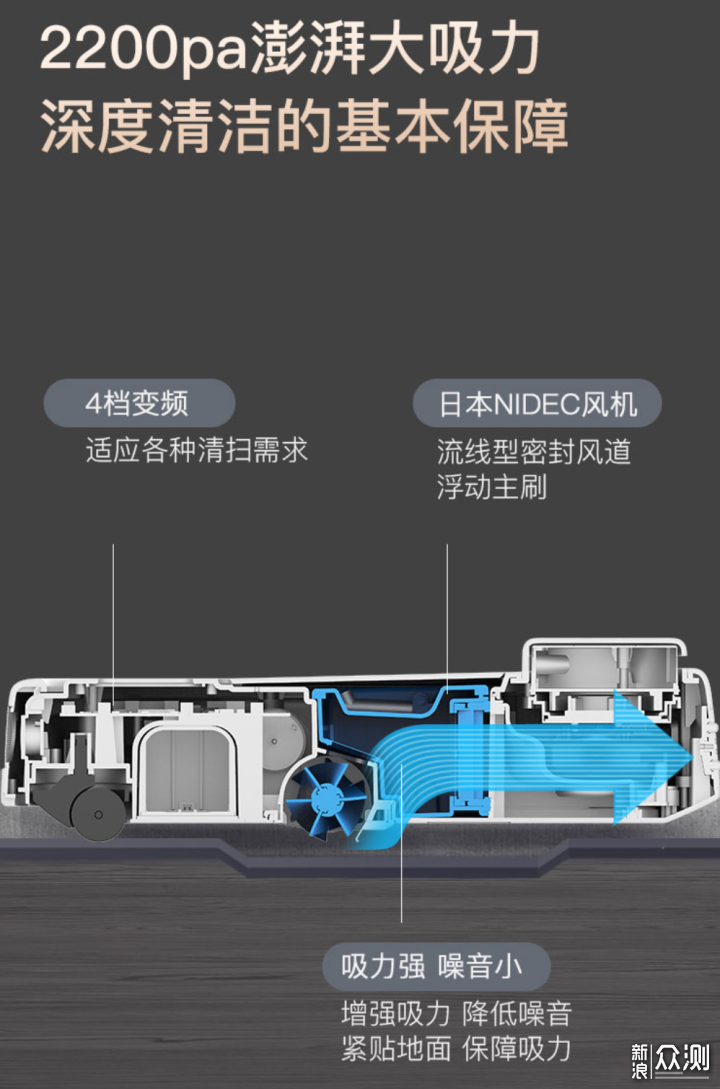
▲2200pa大吸力,能够扫除积尘,果壳毛发自然不在话下,所以,安排上了。


▲大米、小米、黑米、生粉、纸屑,看看清洁效果。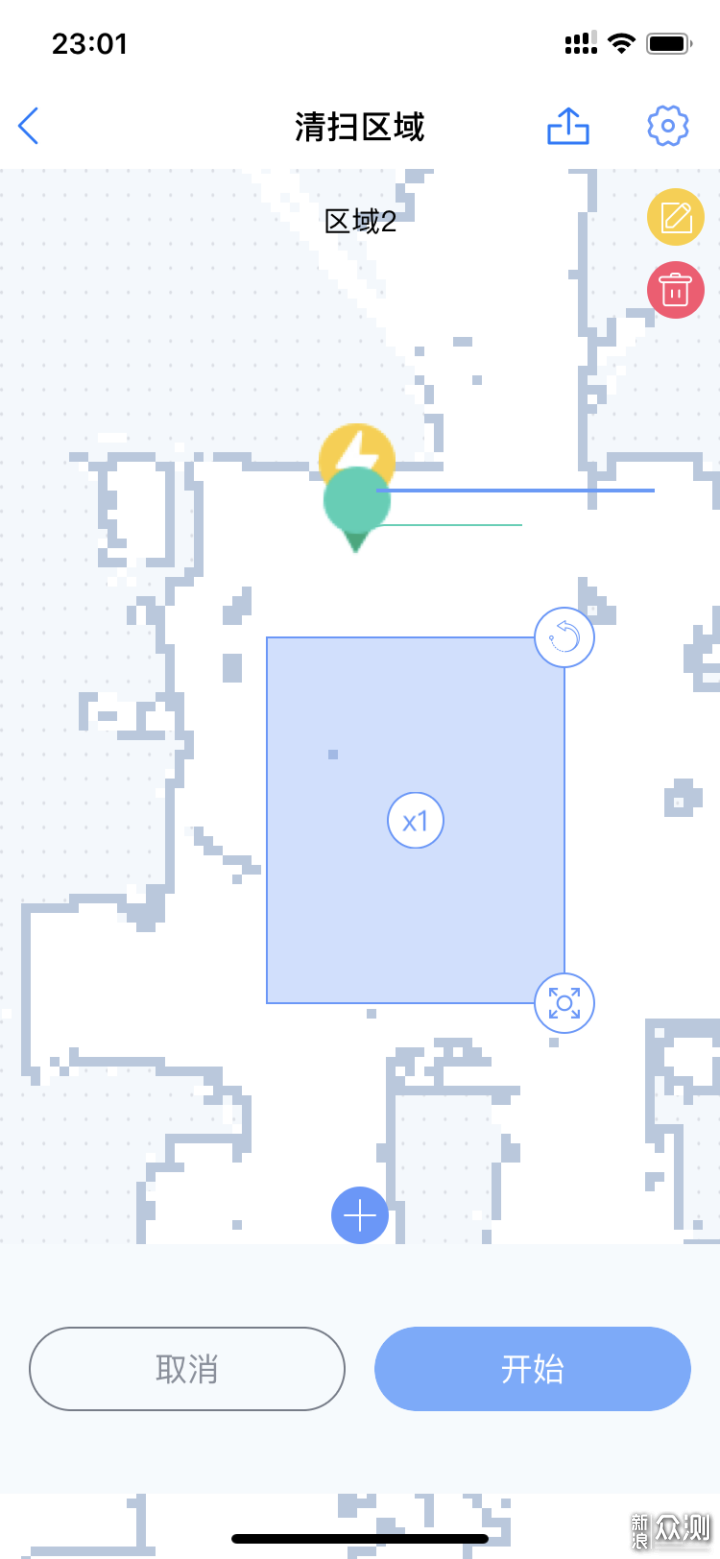
▲选择区域清扫,毕竟小纸屑会被风吹掉,所以区域选择大一点。
标准模式、井字
▲可以看到纸屑会被排风口出来的风吹散。

▲走完一次弓字,生粉还有一些剩余,以及旁边被吹散而扫不到的纸屑。
▲垂直再走一次弓字,基本上全部清完。
缝中还残留一些生粉,因为老房子,瓷砖都没有铺平,缝也比较深。

▲清扫完前后对比,远图。

▲清扫完前后对比,近图。
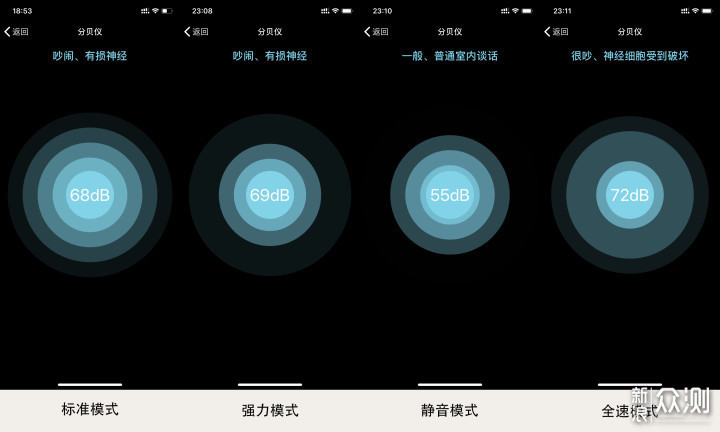
▲噪音对比
可能是手机测试的原因,只能用作参考,实际感受是静音<标准<强力<全速。
第一次使用扫地机器人,从体验上而言还是不错的,新鲜感很足,也很有意思。岚豹激光扫地机器人在App、功能、性能上都有不错的表现,地图识别、清扫模式选择、清扫记录都是比较有意思的体验。
⚪LDS雷达配合SLAM算法精确地图构建,清扫效率比较高,覆盖率广。
⚪地图多、功能多,区域、定点、虚拟墙、禁区、画扫以及断点续扫都是很有用的功能。
⚪5200mAh大电池,续航足。
⚪自动避开障碍物,防跌落。
⚪和智能音箱联动,使用方便。
⚪清扫故障App有提示,方便找出问题。
⚪清洁刷和扫地机分离,容易丢失。
⚪对于3-4cm高度的落差识别较差,容易误冲,希望后续能通过升级固件优化。
⚪噪声偏大。
⚪未带拖地功能(蛮遗憾的)。
关注官方微博 微博
关注官方微信

Copyright © 1996-2024 SINA Corporation, All Rights Reserved 新浪公司 版权所有







