家门口的通勤解决方案:实地无人驾驶通勤车
![]() 唐勋定
2019-11-28 15:24
唐勋定
2019-11-28 15:24
①时尚简洁的设计风;②LED灯带节能环保;③消防设施配备齐全;④行车稳定性不错;⑤自动刹车灵敏,避障灵活;⑥多方式预约验证乘车。
①车头车尾初见容易混淆;②车尾可以设计一个后备箱;③全车玻璃面板镜面效果太强;④建议空调出风口每个位置都有,还能调节;⑤车门关闭阻拦感应可以增加红外;⑥人多且不宽敞的路面不适合这个车。
在AIP2017年关于自动驾驶的调查显示中国有九成左右的受访者听说过该技术,八成左右受访者感兴趣。Ipsos益普索在2018年开展无人驾驶汽车消费者调查,报告显示全球58%受访者对自动驾驶汽车感兴趣,13%的人表示永远不会使用,而46%的中国受访者最有可能使用自动驾驶汽车,使用场景里面通勤占53%、高速公路驾驶占53%。
哈奇智能是广州小狗机器人技术有限公司旗下的品牌,这家公司成立于2016年,产品有触控投影光影魔屏puppy cube等。实地auto无人驾驶通勤车是基于hchi auto而打造的智慧社区无人驾驶通勤服务载具,解决社区出行“最后一公里”的运输需求,保障用户享受安全,便利,舒适的出行体验。

实地auto无人驾驶通勤车在哈奇智能网站上面的介绍
实地auto无人驾驶通勤车是基于hachi auto而打造,车身设计和功能比puppy auto更加完善。外形上实地auto无人驾驶通勤车与puppy auto差别不大,但是多了更多的安全设施,如车门。

puppy auto(图源微信公众号puppyrobot)与实地auto无人驾驶通勤车外观对比,其实就是两个迭代版本的对比。
1.1整体外观
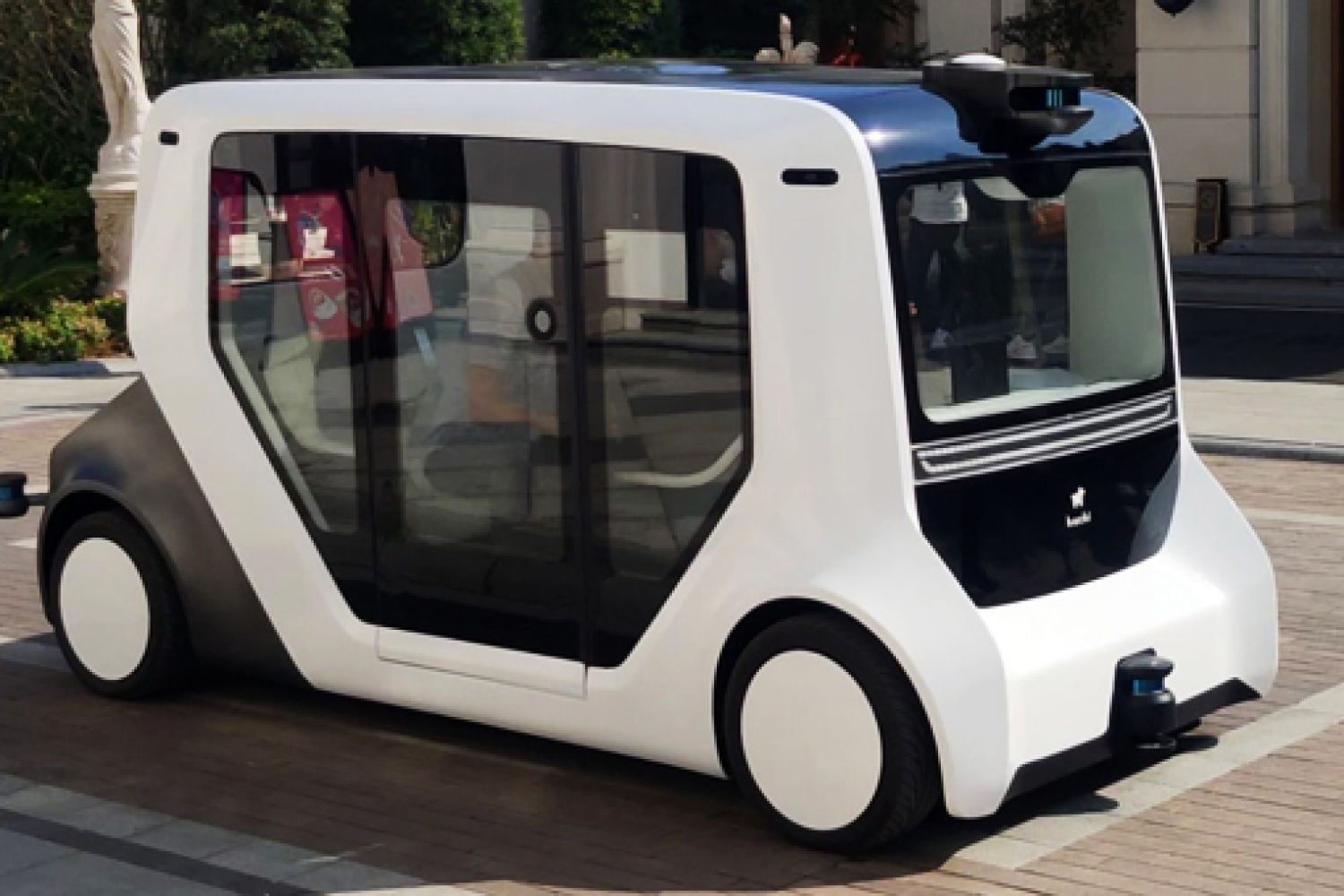
实地auto无人驾驶通勤车整体外观类似于面包车、中巴车设计风格,但是车身外观简洁,具有浓厚的科技风。整车前后车身区分明显,前部车轮稍微突出车身;后部车身灰色区域是电池动力区,显得厚重突兀,反而让人以为后车身是车头。

实地auto无人驾驶通勤车的车头。
1.2外观局部细节
细节上面,实地auto无人驾驶通勤车的车前部垂直设置有两个侦测感应雷达。顶部雷达下面是前挡风玻璃,没有设计雨刷。前挡风玻璃下面是LED灯带,在倒车、转向等动作时警示亮灯。灯带下方是hachi小狗Logo,简洁大方。在挡风玻璃的上端侧面设计有摄像头,应该具有辅助避障系统运行的作用。整个前部车头,设计简洁,功能齐全,科技风十足。

实地auto无人驾驶通勤车的车头底部雷达。

实地auto无人驾驶通勤车的车头顶部雷达与侧面摄像头。

镜面效果强烈的挡风玻璃和LED指示灯带。

LED指示灯带和Logo
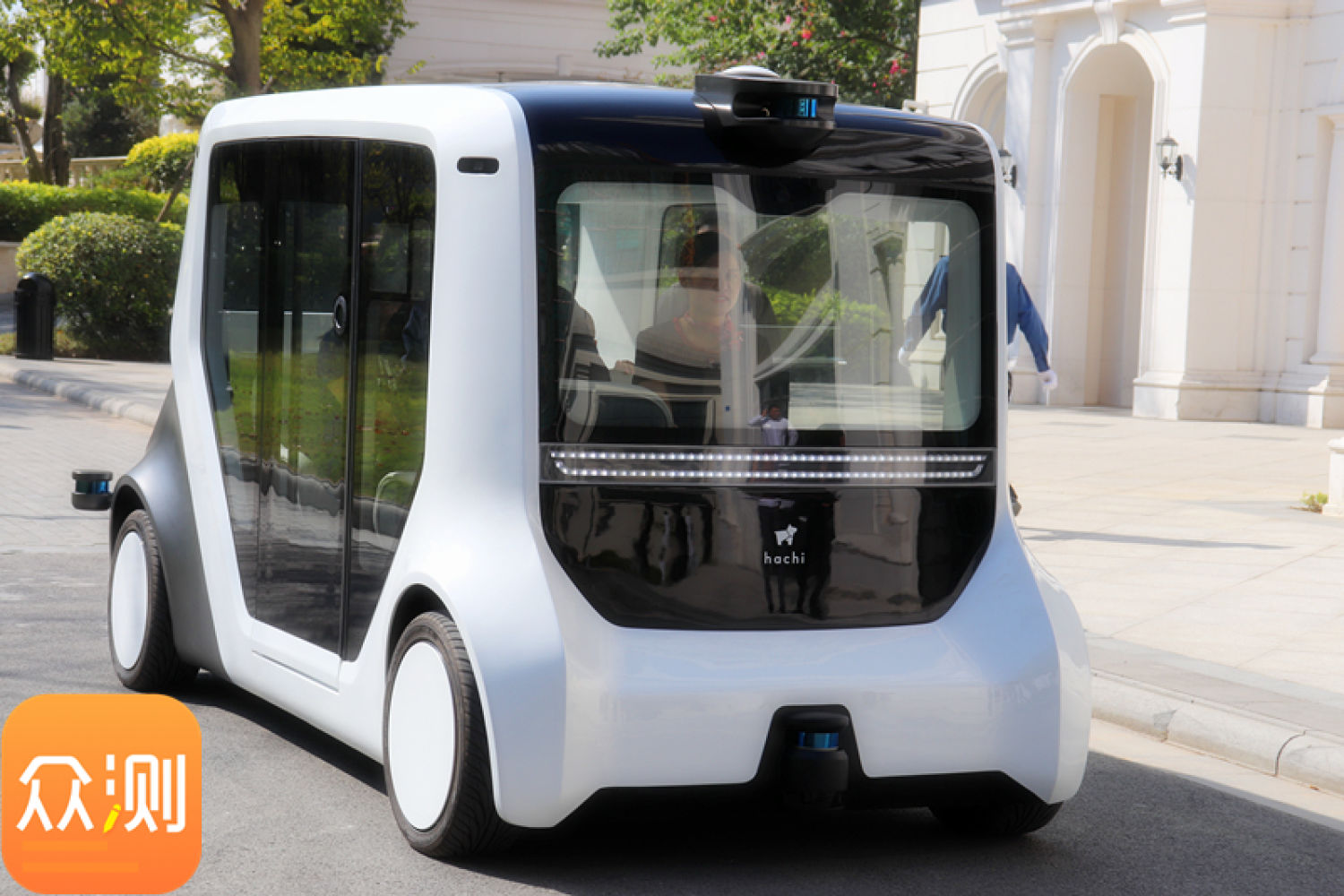
实地auto无人驾驶通勤车的车后部,在车尾底部水平设置有两个侦测感应雷达。感应雷达中间是电池和电池充电口,电池充电口设计的圆角矩形。整个电池部位凸出车厢,导致让人觉得车尾是车头。电池部位上面是LED灯带,功能内容更设计与车前部一直。灯带上方是后挡风玻璃,也没有雨刷。挡玻璃的侧面是两个摄像头,功能与车头摄像头一致。整个车后部,由于灰色为主,显得厚重大气,但是电池部位上方的空间感觉被浪费了,可以考虑设计适当尺寸的运输空间。

实地auto无人驾驶通勤车的车后部(车尾)
车底部四个轮胎,中间轮轴区域被圆形白板遮挡,估计是以后的广告区。上下车的侧面,右上角设计有显示屏幕和验证摄像头,中部设计有开门按钮。圆形的开门按钮上面,初见搞不懂怎么使用,缺一个使用提醒标志。
实地auto无人驾驶通勤车的轮胎:


实地auto无人驾驶通勤车的开门按钮:

上下车的侧面右上部位的屏幕和验证摄像头:

1.3内部配件
此次实地auto无人驾驶通勤车的试乘,车上配备有安全员,坐于主驾驶位置,方便随时人工干预无人车的行动。车内空调新风系统,出风主要设置在车头挡风玻璃下方,其他区域的出风口未发现(可能试乘时遗漏)。座椅设计采用真皮材质,主驾驶位置和后面乘客位置朝向车头方向,副驾驶位置朝向车尾。在副驾位置设计有触摸屏,可以查看、操作设定行车信息。在主驾驶座位区域设置有消防锤、灭火器、紧急按钮、人工驾驶操作按钮。从种类上看,消防安全设施齐全,但是从放置位置来说,配备数量需要增加,放置位置还有改善空间。

坐在主驾驶位的安全员

车内的空调风口
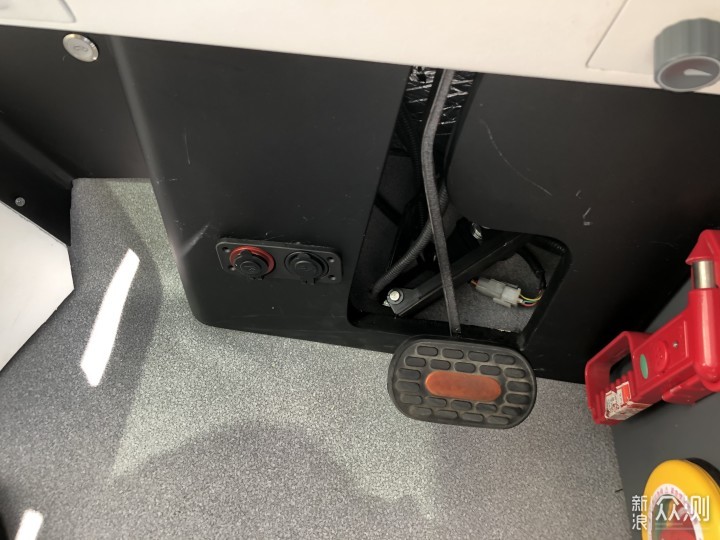
主驾驶位的脚刹和消防锤

主驾驶位的脚刹和消防锤

主驾驶位的灭火器

主驾驶位的人工操作按钮
在实地常春藤,一起去体验的新浪评测团成员看到实地auto无人驾驶通勤车,马上就拿出自己的各种设备上去就是一顿拍,实地的工作人员友好的把车停在路边让大家伙拍照。待人都到期了后,先是实地集团的刘总给大家简单当介绍了一下实地集团和实地auto无人驾驶通勤车,然后就是安排大家伙分组体验实地auto无人驾驶通勤车,其余人员就变成了“新浪实地常春藤看房团”去智能样板间体验实地集团设计的全套智能家居,同时等待试乘无人通勤车,还别说实地集团这套智能家居挺全的,连洗漱间镜子都能完成联网的很多操作。
由于实地auto无人驾驶通勤车现在只是试运营,设计方介绍这是业内第一个在社区环境做的落地试点,所以在这次体验中运行路线相对较短,但有坡道,运行速度也控制在7公里每小时左右。

实地auto无人驾驶通勤车试乘运行路线(图中蓝色标示)
2.1开门
实地auto无人驾驶通勤车乘车可以在社区的App上面完成预约,然后居民可以直接刷脸上车。对于访客,可以让业主预约后,发送验证二维码,通过验证后,通勤车会开门,访客即可上车。现场演示的时候,实地集团的模特,用手遮住脸,然后手拿开一下,马上又遮住脸,就这么一会儿的功夫,就识别并通过了人脸验证。二维码验证演示,大家伙还在说话,还在说怎么让实地工作人员配合我们演示,工作人员不小心从验证摄像头前面挥过手机,门就被刷开了,二维码验证也是非常快。
2.2关门
获得上车权限后,待用户上车后,安全员激活关门程序后,车上刷脸验证的屏幕会显示正在关门,提醒未上车的用户注意安全。在关门的过程中,如果阻拦物的力度不够大,门会一直执行关门程序,直到因为门夹了物品不能闭合或者说因为门夹的物品让门关不了,门才会回弹执行开门程序,待完全开门后又自动执行关门程序。下面视频中展示的就是门夹了一个纸袋的情况,没有什么阻力,所以门快闭合了才回弹。这种情况就是建议增加一个红外感应来额外判断这种遮挡情况,当然红外感应加了又会存在误触的问题,这就需要设计者多考虑一下了。
2.3乘车与避障
实地auto无人驾驶通勤车在规定的路线上面来回一趟约15分钟,先是平路再是坡道接着平路转弯并原路返回。在7公里每小时左右的速度下,给人感觉就是平路稳当,感觉不到上下坡。路上遇到障碍物慢慢刹车的过程中,身体不会前倾,急刹的时候还是会有一点身体前倾。在实际体验乘车和避障演示后,个人感觉这个车不适合行人多的路面,在小区里面最好单独划道行驶。
在特别演示或者说测试的各项避障情景中,实地auto无人驾驶通勤车都能够如设计方案一样智能处理,或是减速停车,或是急刹停车,或是缓慢绕路行车。用一个纸袋作为障碍物时,实地auto无人驾驶通勤车如设计方案一样,在4米左右的位置就停车了。在用帽子做抛物的时候,车在帽子飞过后停车。在面对行进路线的障碍物时,如果有绕行空间,实地auto无人驾驶通勤车会自动规划绕行路线,缓慢靠近障碍物又缓慢离开障碍物。
3.1优点
①时尚简洁的设计风;②LED灯带节能环保;③消防设施配备齐全;④行车稳定性不错;⑤,自动刹车灵敏,避障灵活;⑥多方式预约验证乘车。
3.2改进建议
①车头车尾初见容易混淆;②车尾可以设计一个后备箱;③全车玻璃面板镜面效果太强;④建议空调出风口每个位置都有,还能调节;⑤车门关闭阻拦感应可以增加红外;⑥人多且不宽敞的路面不适合这个车。
关注官方微博 微博
关注官方微信

Copyright © 1996-2025 SINA Corporation, All Rights Reserved 新浪公司 版权所有