
iRobot到底强在哪?米家/iRobot 970对比评测
![]() SeanIXz
2018-10-11 15:49
SeanIXz
2018-10-11 15:49
小米扫地机器人使用一年,其实各方面使用起来还不错,一周清扫三次,尽职尽责,一开始家人也算满意。确实是个解放双手,减轻家务负担的神器。
但我还是有不太满意的地方,由于家里多了个小宝宝,环境变得更加复杂了,不仅地面空间变小了,地面的杂物也变得非常之多(宝宝现在半岁,各种婴儿用品已经侵占了家里1/4的空间了,而且清时家中一直会有人在了)。
面对现在这样复杂的环境,小米扫地机器人此时就显得并不那么好用了,经常被困住,清扫时间变得非常长,100平的房子清扫面积其实只有40㎡左右,从以前的40分钟不到变成了现在60分钟才能完成任务。
最烦恼的是经常各种意外挂掉,变成了半自动化了,家里长期有人的环境,稍微动下它就容易出错,卡死在各种地方。

清扫成功次数寥寥,效率低以只是其一,实际上还有如下几点(一年的使用过程中总结出的小米扫地机器人的缺点):
1. 每次启动都是全房扫一遍,即使划定区域也只能全房扫描过后再来一次,第二次又要重新全房扫一次之后才能区域规划,并不能每次定时计划都执行区域规划清扫,虽然每次都画了地图,但是并不会“记得”,第二次还得重新扫描一遍才能划区域。
2. 对磁性虚拟墙的反应不够灵敏,即使我全房危险位置贴好了虚拟墙也经常冲破障碍,刹不住车直接跳下2cm高的“悬崖”。
3. 越障碍能力不行,2cm的台阶死活也上不来了。而我房里的门槛石基本在这个高度,这导致家里大量地方不能清扫,每次就只能关上卧室门扫个客厅+餐厅。
4. 会对与一个特定的物体杠上(比如落地扇的圆形底盘之类的物体),只要是圆形底盘都会不依不饶的怼上个三五分钟,怼的同时轮子磨地的噪音巨大。
5. 杂物阻塞,数据线缠绕,这倒是通病,危险的是会把电线另一头的一堆东西扯下来,家里长辈们并不会每次都记得把床头遗落在地上的数据线收起来,经常拖着线扯着插座走了很远,这是个安全隐患。头发多得每次都能卡死机器人的主刷,经常需要清理,清理也非常不方便。
6. 地毯是死穴,特别是丝毛地毯,上都不能上去,一碰就会被流苏卡死。
7. 吸力不够,木地板缝隙里的杂物基本没效果,达不到过敏原清除的效果。
从刚开始的赞不绝口四处安利,到现在的有点嫌弃,米家扫地机器人不再适用于各年龄段人口都有地面比较复杂的情况了。

而我家里的伏地魔也无时不刻不在提醒我地板要扫要擦了。做为一个合格的奶爸需要给宝宝健康干净的环境,地板上的污渍和过敏原也是需要清除的。也把一直种草的米家升级版扫拖一体机的石头扫地机器人剔除了购买意向单,同门师兄导航系统也是和米家一脉相传,可能最后也会是个不省心的结果。显而易见的是扫拖一体虽然看着美好,但一台机器要完美实现两个功能基本是不可能的事情。

主要纠结点在于:清扫过程扫拖同时进行要么尘盒小了,要么储水盒小了,而且大面积清扫抹布多半要换,不可能全房都一块抹布抹干净,清扫过脏区域再来清扫相对干净的区域带着的一块脏抹布会污染所有地面,地毯上也会上去拖,沾湿了地毯更加麻烦,可能并不会比现在的好多少。
本想将就着用米家扫地机器人算了,但是随着家里新房装修快结束了,到时候我还是会需要一款扫地+拖地的机器人,到搬新家的时候宝宝更大玩具更多活动范围更广了,地面情况可能比现在更糟糕。
但是……此时的我也已经被扫地机器人宠坏了,再也离不开它了,生命不能浪费在扫地擦地这种事情上面,我必须买一台(扫拖一体)更好更强力更省心的,一台不够那就两台(扫地+拖地),一步到位不再纠结。
最后购入了iRobot 970+Braava 380,下面来看看实战情况吧。
到底有多享受,还是需要做做测试才知道。
评测之前还是简短开个箱。

从外包装上可以看出Braava的体积稍小,970的左下角标了个手机标志,表示支持无线App操作。

打开Roomba970,深蓝色外壳,只有三个按键:CLEAN(清洁)按钮、SPOT(定点清洁)按钮、DOCK(回充电桩)按钮。

Roomba970装箱配置。

Braava开箱。同样只有三个按键,电源,湿拖,干拖。

Braava 380装箱配置。

合影,设计上都采用了深色的配色,一大一小,一个扫地一个拖地的好搭档。

Virtual Wall双模式虚拟墙,虚拟墙分为两种方式,开关打到上部为线条形虚拟墙,开关打到下面为环形虚拟墙,可以根据需要设置隔离区域。
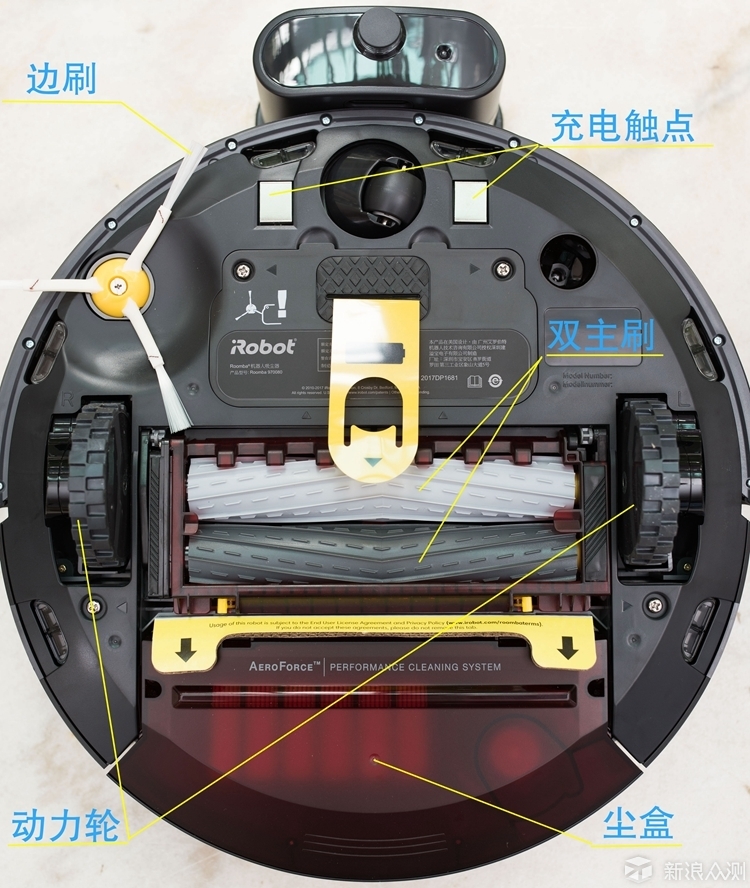
Roomba 970扫地机器人具有特殊纹路设计的双滚筒胶刷。
一方面,不同于传统单主刷,Roomba 970的双胶刷设计可以通过高速地相向旋转有效分解碎屑和卷入毛发;另一方面,不同于传统的棕毛刷,胶刷设计可以有效减少毛发缠绕,维护非常方便,非常适合养宠物或毛发较多的家庭。
比较突出的是独创的可反向旋转的免缠绕的胶棒式清洁双主刷,优势在于降低了毛发缠绕的概率,同时在遇到线缆时可以反向旋转将线缆吐出,减少地形限制,这样的胶刷确实是个非常好的设计。要知道清理米家扫地机器人的时候是需要剪刀来剪断丝丝缠绕在主刷上的头发的,同样情况也出现在戴森的吸尘器吸木地板的吸头上,剪刀清理的时候也要十分细致的避免剪断主刷的刷毛,清理工作非常之繁杂。

Roomba970充电座支持宽幅电压以及50/60Hz,全球通用,输出20.5V电压 1.25A电流,功率33W。

Braava380湿/干清洁垫+抹布
Braava 380的清洁垫与抹布分为干/湿两种,以应对不同的使用需求,值得称赞的是抹布的固定方式兼容常用的大部分抹布。通用抹布也只要三五元一块,后期耗材上并没有很大的开销。
开箱就暂且到这里,主要的还是测试过程。
针对上文里提到的小米的缺点以及iRobot视觉导航的优势,主要做下面几点的评测,同时加入小米做对比(竟不小心一下子拥有了三种导航系统)。来看看iRobot到底好在哪里。
1. 导航系统对比测试。
2. 清洁效果测试。
3. 悬崖探测测试。
4. 学习/记忆功能测试。
5. 噪音测试。
6. 越障/躲避障碍测试。
1.导航系统对比测试
导航原理/功能:
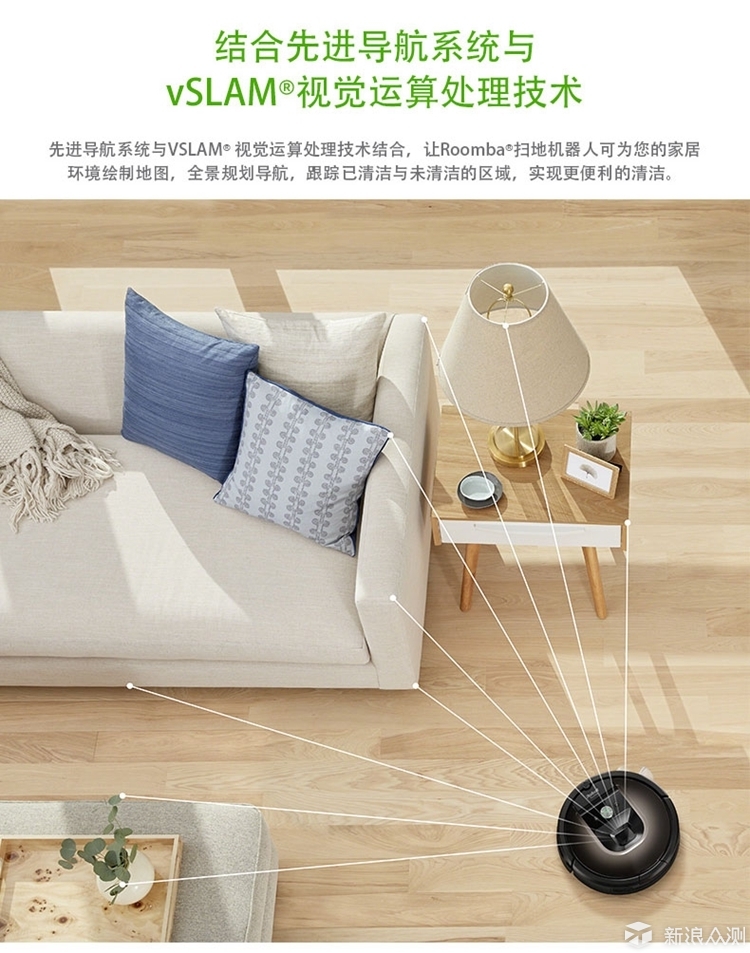
iRobot 970不同于单纯依赖于vSLAM一个导航系统的产品(例如戴森360eye),Roomba 970 扫地机器人搭载了三重传感系统:Wheel Odometry(轮胎里程计),Optical Float Sensor(光学移动传感器)以及vSLAM视觉运算处理技术。
配上iAdapt2.0可视化全景规划导航的解决方案,比起其他系列是个质的飞跃,iRobot也终于开始路径规划了。
Braava 380

Braava 380则实际上也是靠的iAdapt2.0来实现的导航规划,但是用上需要配合北极星导航系统的导航盒来实现更精确的覆盖。

米家扫地机器人米家扫地机器人则主要是LDS激光距离传感器,就是上文所说的激光测距式导航系统。路径算法上是Z字形覆盖,简单有效。
vSALM和LDS的区别:
iRobot的vSLAM视觉运算处理技术配备了先进的图像传感器,能够像人眼一样读取到具有细节的3D图像,让Roomba扫地机器人能够更加智能地识别周围环境。vSLAM是SLAM技术的一个分支,其中的”v”是视觉 (vision) 的意思,也是计算机视觉的一部分。具体来讲是指机器人在未知环境中,通过一个摄像头捕捉周围丰富的3D环境信息,在移动过程中根据位置估计和地图进行自身定位,同时在自身定位的基础上建造增量式地图,实现机器人的自主定位和导航。
激光雷达技术(LDS)只能捕捉到周围环境一个切面信息,获取的信息也非常单一,没有太多细节,因而在被挪动之后很难重新定位。
看起来确实高大上,究竟怎样?实测才知道。
测试方法:同一块区域延时摄影记录行走轨迹。
我选择了家里相对比较规整的区域进行测试,但也每个门口都有门槛石,门槛石前有门压条等障碍物,稍微有点复杂度,但总体比较简单,测试清扫覆盖面积。
*注:轨迹有断点是由于用的间隔拍摄,两次快门间有短暂的间隔产生的。
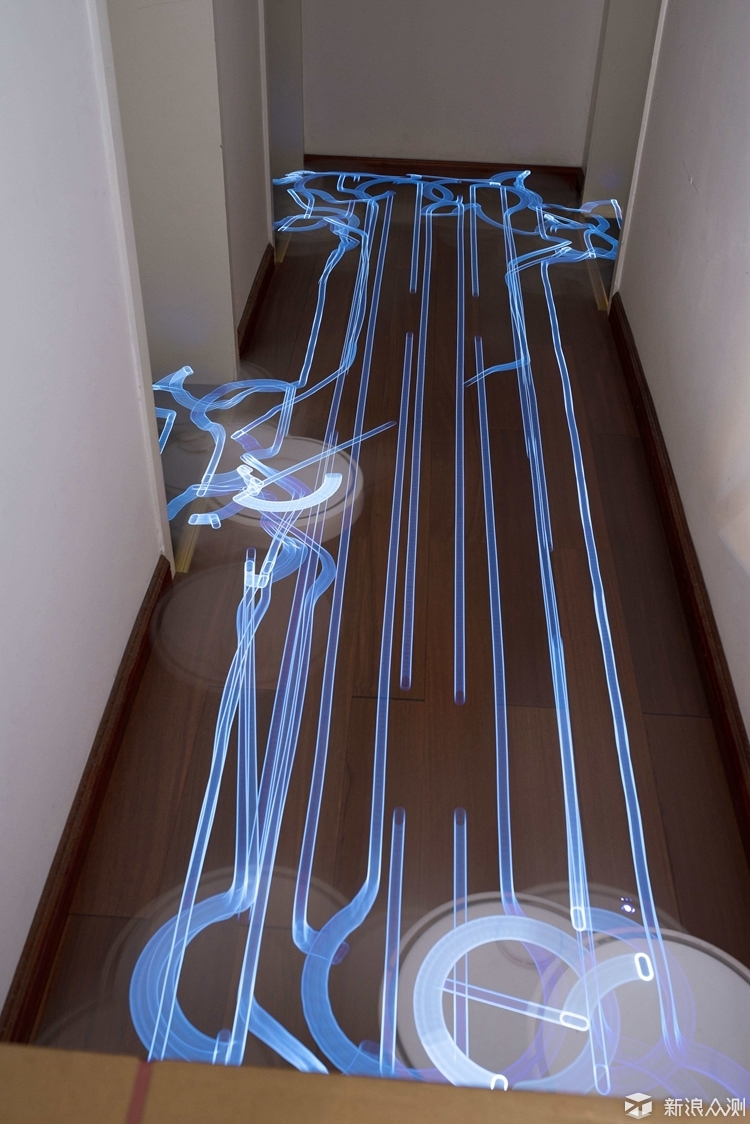
iRobot Roomba 970轨迹上Roomba 970分三种轻扫模式,分模式进行了三次测试,轨迹图如上。Braava 380也有两种模式,湿拖与干拖模式,轨迹图如上。米家扫地机器人,只有一种模式,轨迹上与Roomba 970的单独一次清扫模式及Braava380干拖模式差不多。
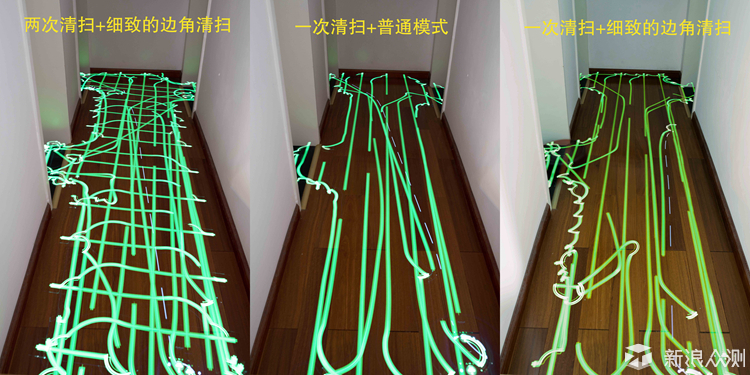
iRobot Roomba 970走出了新高度,两次清扫模式下井字形轨迹以及细致的边沿的清扫全在覆盖的情况下还交错着扫地,在边角位置会进行螺旋式的转体清扫,提高清洁效果。
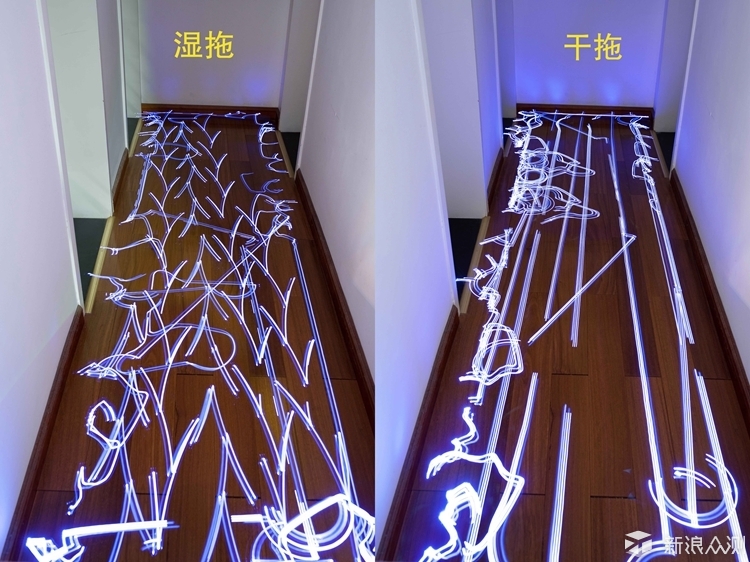
Braava 380的表现也不错,比较有特色的是湿拖模式下的人字形轨迹,往复的擦洗动作,确实如人手一般的效果,只是你不在需要跪地了,而干擦模式在边角区域会进行旋转操作。看似没有眼睛完全靠碰撞来导航的Braava380在北斗的指引下也行走的非常规整。
米家扫地机器人也有不错的表现,基本可以全覆盖,不过只能与Roomba970的“一次清洁”模式类似,边角没有很好的照顾,行为上更像机器人,执行死指令。
2.清洁效果测试

根据Roomba960的资料,Roomba970应该也是使用的日产电机NIDEC 20N无刷数字电机,在12V下提供1300帕左右的风压(数据来源于电机制造商)。

3300mAh电池续航120分钟而我拆开看Roomba970的电池,根据DC14.4V输出电压判断,额定电压下最大风压应该在1600帕左右,而5倍劲吸的增压加大功率模式下具体到多少就不得而知了。
米家的风压根据工作模式的不同在800帕-1600帕之间,而擦地机器人工作方式不同也没有可比性。
由于有5倍劲吸模式的功能上的区别,所以这里先单独测试Roomba970对不同类型的垃圾进行清扫的对比,测试下清洁能力。
清扫测试物品:

四种从粉末到颗粒到块状,大小不一,均匀的洒在木地板上,来看看具体清扫情况如何。
下面开始测试。
面粉清扫测试
面粉还是比较难清扫的,可以看到的是在探测到有污渍的时候iRobot970开始重点清扫模式,往复多次覆盖了污渍区域,也开启了5倍吸力,增加清扫力度。
虽然清扫掉了98%以上的面粉,但还是有薄薄得一层粘得太紧几次覆盖都没有能清理掉,再用Braava 380来湿擦+干擦一遍就非常干净了,媲美人工清扫。
面包糠清扫测试
面包糠颗粒比较大,清扫起来更干净,但也触发了污垢探测模式,有往复清扫的行为。

黄豆清扫测试
黄豆主要的问题是圆形易滚动,而且圆形的外形不利于吸尘器吸入,但也很好的完成了任务。
花生壳清扫测试
大小不一的花生壳也比较容易清扫,对于大颗粒固体垃圾而言是非常有效的。
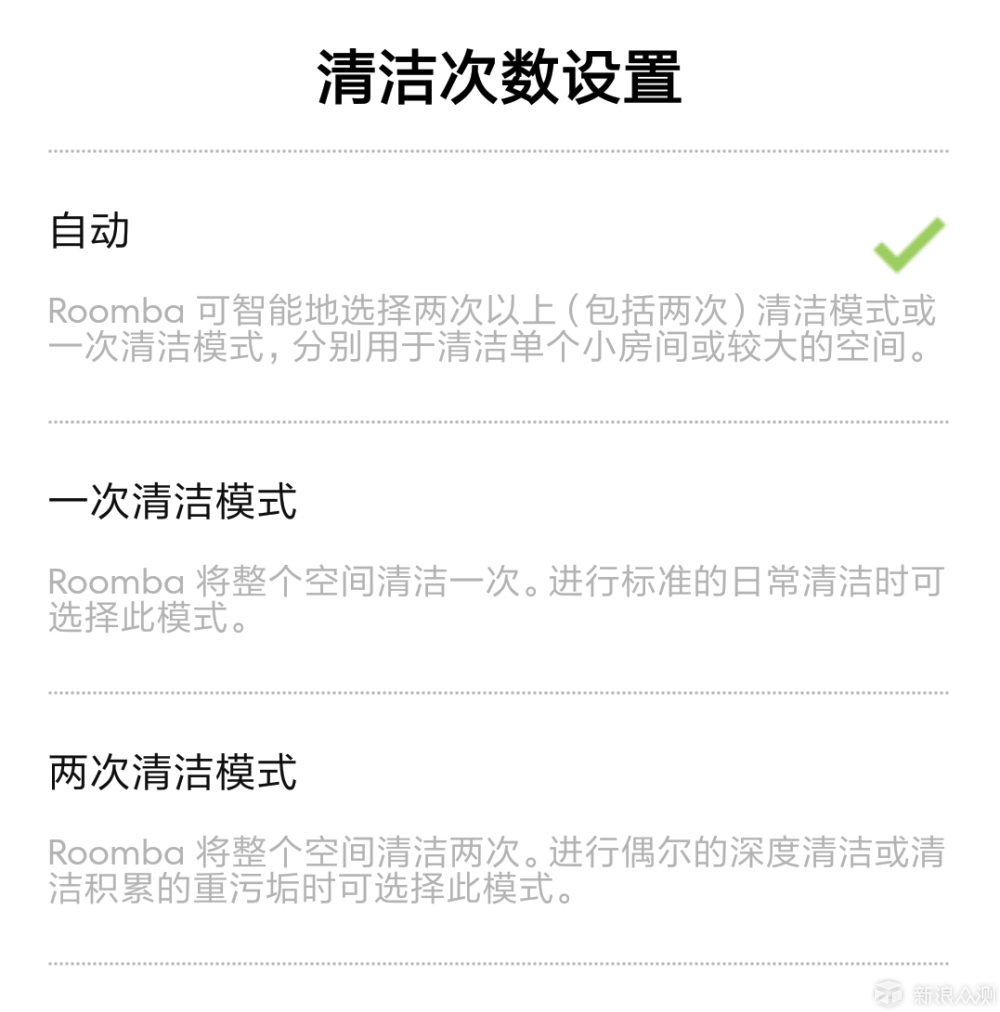
但我疏忽了一点,我开的两次模式,没有开细致的边沿清扫。
而自动模式的描述上是智能选择清洁模式,既然有智能模式加成,我觉得还是打开自动模式和小米对比下更加直观。

米家扫地机器人面粉清扫测试
小米开的强力模式,清扫上还是全覆盖了,但是面粉会被推进木地板的缝隙里,缝隙里的面粉就比较难清扫了,可以看到清扫范围内缝隙都是填满了面粉,形成了一条条的白线,表面残留的面灰也比较多,主要原因是行走轮粘带了粉尘,以及边刷把粉尘抹均匀了,填进了木地板缝隙。
并没有很高的智能程度,只是机械式的覆盖清扫一遍。

Roomba 970面粉清扫测试
这次开启了自动模式,可以看到明显的改变是自动模式下清扫了多次,而且也在污渍区域往复清扫了几遍。看得出确实有智能识别污垢并加强清扫的行为改变。

清扫后缝隙积灰特写
再来看看清扫后的缝隙,虽然还是有残留,但不是填满的状态了,中间有黑色缝隙,可以推断至少是能吸出缝隙里的一部分灰尘。而且对于木地板这样有纹路的地面,井字形的覆盖也能在一定程度上增加洁净程度。
进阶版Dirt Detect污垢探测模式:Roomba 970能够通过声学和光学传感器,检测到垃圾集中的区域,从而对该区域自动进行反复重点清洁。

可以识别污垢和垃圾,自动进行重点清洁。这是面粉测试的工作历史记录报告,对于污垢的探测上是非常灵敏的,即使面粉这样的细小的附着在表面薄薄一层的污垢也能识别出来(地图上的十字标记为污垢标记),光波+声波的识别率还是非常高的。
Braava 380擦地
再付送个Braava380的擦地动图,可以很直观的看下仿人工跪式擦地的工作状态。可以擦掉之前测试地板表面残留的面粉,但是缝隙里的少量面粉实在擦不掉。缝隙里的连我自己人工也难清理掉,有点后悔做这个测试了……日常情况下这样大量的粉尘堆积还是比较少的,当然平时也要多除尘才能防止木地板缝隙里积灰。
3.悬崖探测测试
跌落测试,主要测试传感器的高效性,以及机器人的反应速度。
测试方法:置于椅子上打开工作模式,看机器人对悬崖的反应。

Roomba 970

米家扫地机器人
动图均为400%播放速度,可以看出效果都不错,对于这样的高度悬崖探测很灵敏。
但是实际使用过程中,我遇到过很多次米家扫地机器人在很多的情况下跌落下悬崖的时候(悬崖不是很明显,悬崖不是很高但足以阻挡机器人会去,稍有坡度机器人顺势冲下去了。),概率还不低,而且遇到了悬崖+边角处时脱困十分困难,这是十分头疼的事情,而更加头疼的是改变位置后它会重新开始全房清扫,已经清扫的地区也会重新扫一遍,十分浪费时间。
而Roomba970在我最近的使用过程中并没有遇到跌下悬崖的情况,基本都是一次清扫搞定。
4.学习/记忆功能测试
但我想再测测意外停机换位置启动重新工作时的地图位置识别以及恢复清扫的状态。

只有这样才能证明机器人是真的画了个地图,有眼睛有思想才真的知道自己在哪,也能知道自己要到哪去。我在那儿?要去哪儿?怎么去?这大概是扫地机器人的人生三大哲学问题了,它一生都在思考这三个问题,显然没有个强大的分析处理系统时很难想明白的。
测试方法:用小米和Roomba970分别清扫相同的空间,清扫过程中将机器人拿起运送至曾经清扫过的地方放下继续清扫。
机器人识别的清扫空间
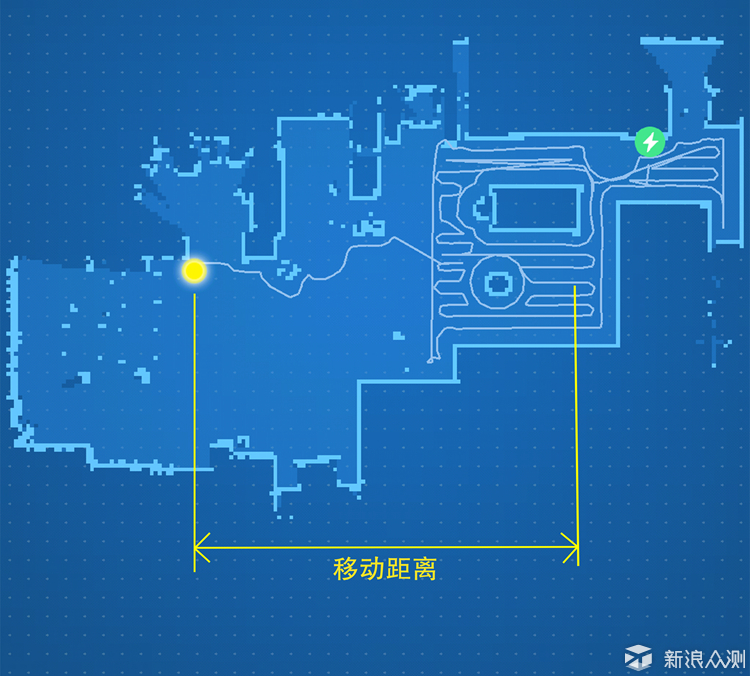
清扫空间为客厅+餐厅,为了显得有记忆,我特意将两个扫机器人的充电座放在比较隐蔽的位置,有拐角及遮挡,较远处不能“看见”。移动的距离如图,从餐厅移至客厅,大概5米的距离。从探索区间移至已清扫区域,看是否有记忆。
接下来就看各自的表现了。

米家扫地机器人移动过程

Roomba 970移动过程
两台机器人都是大概清扫在同一位置处拾起,再放到相同的清扫过的位置。

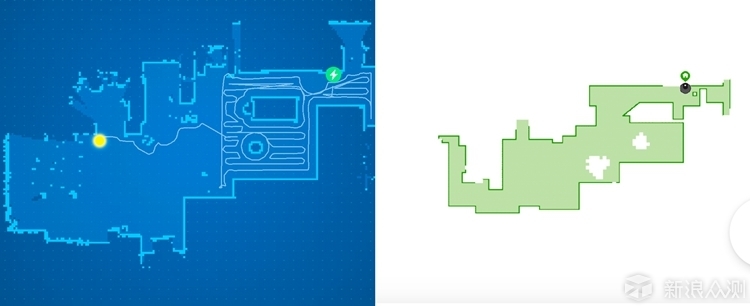
米家扫地机器人很明显地图发生了变化,往回移动之后把清扫过的空间识别为了新的未清扫空间,并重新规划清扫了一遍。在回充电座的过程中非常曲折。。

Roomba970地图未发生变化,能识别出自己所处的位置,没有重复清扫所在区域,能顺利返回充电座。
二者对比起来很明显米家扫地机器人并不知道自己在哪,不知道自己去过哪,只知道自己要干什么,这次能回充电座是碰运气路过了(扫完返回并没有直接往充电座走对着墙角撞了七八分钟),如果距离再稍微远一点(比如有拐角)就很难回去了。
实测确实如此,具有vSLAM视觉运算处理技术的Roomba970从某种意义上确实是能看见了,能记住了。对于生物而言看得见和记得住是最基本的是生存条件,但是对于机器人而言这是前进的一大步,视觉的重要性不用多说,生物90%的信息量来自于视觉,视觉信息量更大更复杂。显然激光导航模式因为信息量有限,所以才不能做出正确的判断。
而且这样的学习记忆技能在多次清扫后会进行优化结合污点探测功能,全屋清扫进行四次之后达到最佳状态,可以极大的提升清扫速度。
我不禁好奇那没有眼睛怎么办?蒙上眼睛岂不都是失效了,不能扫地了?天气不好也扫不了地了?
那再来测测挡住摄像头是什么结果。
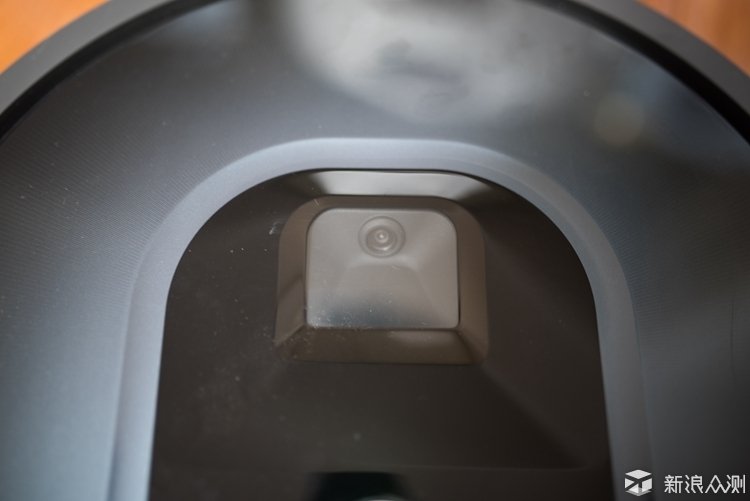
所谓“眼睛”是一枚摄像头,位于扫地机器人顶部,但这视角应该是看的墙壁天花板和高一点的家具,可能识别方式上是将实物转为线图,再运动中不停采集画面建模从而达到“看得见”的效果。
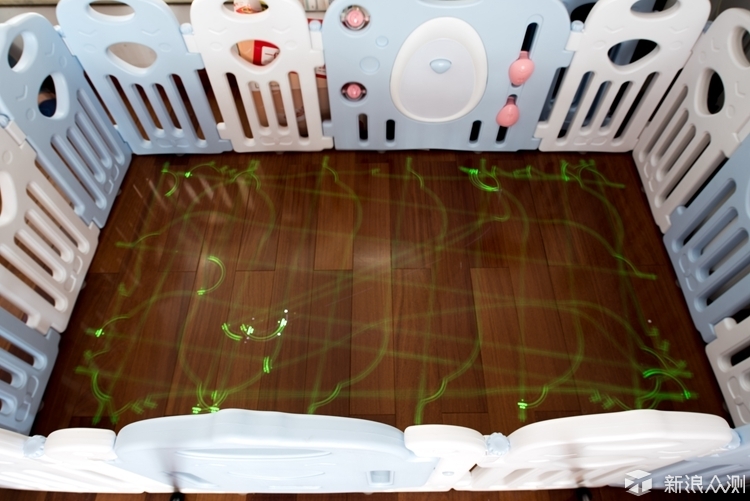
睁眼清扫
正常情况下的行走路线。下面把眼睛蒙上再相同模式清扫一次。

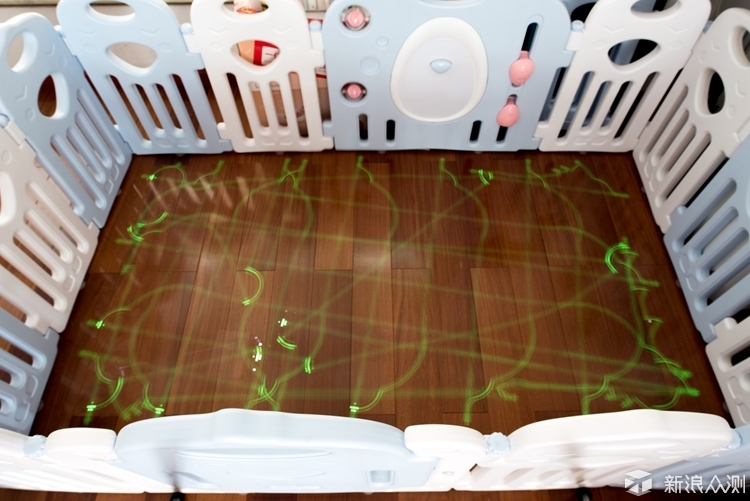
蒙眼清扫
并没有什么大区别,看来视觉带来的是增加记忆力和认知力,基本的导航与路径规划只需要iAdapt2.0就可以胜任,全天候作战并无压力,蒙眼后只是不能做下次清扫的优化计算了。
为了学习和记忆为清扫做优化竟然做了个vSLAM视觉运算处理系统,只是减少清扫的失败率和提高清扫效率。
6.噪音测试

米家扫地机器人噪音

Roomba 970噪音
噪音上倒是没什么对比性,主要是吸尘器的声音,运行起来都一样大。
实际上噪音是差不多的,米家扫地机器人在角落处发出的噪音经反射更集中带来了一点差别。噪音倒不是评价扫地机机器人的主要因素,因为大部分家庭在使用的时候都是离家状态,相较而言智能和省心更重要。
7.越障/躲避障碍测试
越障能力米家扫地机器人官方标注为1.5cm,iRobot Roomba970为2cm,就不对比测试了,我没有正好2cm的物体,即使证明了Roomba 970能翻越2cm也意义不大,毕竟数据已经摆在这里了。
在这里我更想看看防绳/数据线缠绕能力。

测试方法:用三种不同类类型的绳子/数据线绑在椅子脚上进行测试测试场景测试椅子底部的数据线、粗绳、电源线的障碍脱困及通过情况。
这三种也是家中常见的障碍物。

米家扫地机器人测试障碍物设计,障碍物为堆叠在一起的杂乱线团。

米家扫地机机器人障碍缠绕测试
米家扫地机器人卷走了粗绳,还拖动了椅子,最后绳子卡在主刷和轮子处才故障停机。如果不是绳结散开了估计会拖着椅子继续完成工作。这非常危险,很严重的安全隐患(比如把桌上的物品扯下来),米家扫地机器人并不知道自己处于什么样的状态,不能识别受阻/被困,依然在执行死命令。米家扫地机器人被粗绳锁死。

将机器翻转过来查看缠绕情况,这种粗绳其实应该很难卷进去,但是仍然卷进了主刷,我在清除过程中只是稍微一拉就能扯掉卡得并不十分死,但是只能往一个方向转动的主刷并不能脱困。
下面是Roomba 970的测试。

iRobot Roomba 970障碍设置
同样设置的杂乱线团。

测试过程中确实被缠绕困住了一小会儿,但是几秒就脱困了。

仔细看看发了什么,越过障碍的时候主刷被卡住了,边刷也受到了阻碍,但是机器人识别出了被困并反转吐出了缠绕物,主刷与边刷也暂停工作了一小会儿,成功摆脱困境。确实如官方宣传的防缠绕一样起了作用,双胶刷的设计也在很大程度上减少了缠绕水平。
据称iAdapt2.0导航系统升级到2.0之后经过这么多年的实战已经能应对几万种复杂情况了。
说到胶刷再来看看使用几天后的毛发缠绕情况。
使用条件说明:家里有三个长发女性,长发对于吸尘器和扫地机器人而言,绝对是谋杀主刷的杀手,缠绕过多的头发不但会使清洁效果大打折扣,也会卡在转轴处进一步卡死主刷。

清扫后的胶刷特写。清扫后胶刷上杂物非常多,也有少量头发。

拆下来看并没有缠绕很紧的情况,算是正常的沾染水平。

由于没有毛刷,清理起来很方便,基本上取下抖两下就没有了。

尘盒入口处竟然还有笔芯这样的大件。

尘盒内的大量头发可以判断出长发大多数可以顺利的从胶刷吸入尘盒,而不是缠绕在主刷上,这也是胶刷的优势,因为毛刷束根部缝隙窄会夹住毛发,自然会把头发之类的线状垃圾一圈圈的卷起来越缠越紧。
实测之后才知道,原来导航上差的这么远,原来“智能”这两个字如此难实现,原来记住和学习这样看似简单的功能实现起来会如此复杂,一个简单的脱困都需要大量的识别传感器以及多年的脱困算法技术积累。做到“智能”也真的不简单。
看来国产还有路要走。
关注官方微博 微博
关注官方微信

Copyright © 1996-2024 SINA Corporation, All Rights Reserved 新浪公司 版权所有







