
会自己倒垃圾的扫地机器人:iRobot i7+评测
![]() SeanIXz
2019-04-09 10:39
SeanIXz
2019-04-09 10:39
终于扫地机器人已经开始自己会倒垃圾了。
iRobot最近在中国上市了一款会自己倒垃圾的扫地机器人。

对比起来,i7+在规划系统、胶刷、吸力上做了升级,新增了Imprint智能规划技术、Clean Base自动集尘充电座,另外处理器也做了升级。
简短开个箱,产品分两个包装盒寄来。

左边iRobot Roomba i7扫地机器人,右边为Clean Base自动集尘充电座。

简约的包装盒,简明的标注了几项功能。

先来看看扫地机器人i7。

虽然买的是i7+套装,但仍配备了单独的充电底座,外形上我一眼看出了与iRobot Roomba 970有所变化,似乎更苗条了。

左:Roomba i7
右:Roomba 970
对比起来更直观,原来只是尾做了减法,去掉了较厚的后部挡板,大体设计未改变,不过按键改为了触控方式,使用寿命更长,摄像头也更加靠外。

装箱配置:iRobot Roomba i7、说明书、充电座、备用尘网滤芯、备用边刷、虚拟墙装置、电源线。

Roomba i7+集尘充电座配置:集尘系统自带充电座功能,配备了专用的配套尘盒,底部带出尘装置。

Roomba i7底面设计。

Roomba 970底面设计。
几乎一样,,尘盒的改变比较大,减小了尘盒体积(因为满了自己可以回去倒垃圾),胶刷升级为双效组合胶刷。

胶刷颜色稍有区别,深色胶刷起到刮取与聚拢作用,提升了拾取大颗粒污垢的能力,浅色增加了便于拾取固体垃圾的虚线凸点,增加拾取力,同时利于夹取毛发,宠物以及长发都非常适用。
这算iRobot的专利了,实战效果确实出众,从此告别了毛发烦恼,卷上的毛发大部分会被吸进尘盒,小部分卷绕的只会堆积在两端,清理起来只需取出就行了,非常方便。采用同样设计的iRobot 970实战大半年的我告诉你,再也没有剪过滚刷上缠绕的头发。

胶刷仓,带简明的安装标识,可以看到中部的污垢探测声波传感器,可以根具吸取的垃圾量判断地面干净程度,从而采取不同的清扫模式。
这里有点需要提一下,其他方面全自动基本不用管,日常使用中只会遇到尘满提示,由于胶刷设计什么样的垃圾都能卷起来,包括衣服吊牌,扎带,弯折的扑克牌,甚至直接一张纸,卷起的大件会挡住传感器造成尘满提示,所以日常使用中有较大概率遇到吸入的一团纸卡在传感器口造成扫地机器人停运。
i7+升级的集尘装置或多或少是为了解决这样的问题,现在可以实现完全的自动化。

尘盒,可一键式开启,左侧为尘滤,带提示,尘盒可水洗,拆洗前需要取下滤芯。
比起970少了个边,实际上是把设计在尘盒的电机移出去了,改进之后的尘盒可以水洗了,移到机身里的电机也可以做减震吸音处理,降低噪音。

Roomba 970尘盒与电机一体,不便水洗,且尘盒电机占用了空间,并没有大很多。这样舍弃了小部分空间换来了较大的便利,不过尘盒一般不会拿去水洗,倒掉灰尘清下滤芯表面就可以了。

左:Roomba i7+
右:Roomba 970
对比起来实际上不少配件是通用的,比如导向轮,驱动轮之类的。
战斗半年多的Roomba 970,基本是自动状态运行,计划任务周一到周五全房清扫,每周清理一次尘盒,差不多这样的频率,损耗不大,仅边刷和胶刷少许磨损,预计原装一套配置可以使用1年以上。

不过胶刷这两款并不通用,固定结构上有所差别,但谁更高效,待下文测试后再做评价。

集尘充电底座,可以看到右边带灰尘出口,底部有充电触点,上盖可以打开。

打开上盖,内部为集尘袋,带锁紧装置,合上盖之后出气口与尘袋有压力锁紧,提升气密性。

集尘袋带个塑料挡板,手拿把手提起来自动关闭,避免灰尘洒出。

甚至带密封胶圈,作为一次性用品,这显得有些有些过于奢侈,iRobot的设计理念应该是最大化的提升用户体验,不过集尘袋的价格比较贵了。
标配两个一次性集尘袋,袋子为无纺布材质,估计后期会有更廉价的解决方案。官方数据为:可以收集相当于30个尘盒量的污垢、灰尘与毛发。按我目前iRobot 970的使用情况,一周清理一次尘盒,可以连续使用30周,7个月?7个月不管还是不现实的,长发用户可能要每隔一段时间清理缠绕的卷发,但可以把操作间隔至少延长到1个多月。
确实,好的机器人就应该高度自动化,极力减少人工干预,这点可以说是用户体验上质的飞跃。
这么算起来一年差不多也就两个集尘袋,还算可以接受。

另外底座背部也设计了线材卷绕槽,两侧均可出线,设计更美观。

开箱完毕,有一定升级,硬件软件均有提升,比较感兴趣的是CleanBase集尘座的工作方式。
但具体表现如何?下面开始实战评测。
作为一个扫地机器人,首要order是:我在哪儿?要到哪儿去?怎么去?除此之外智能程度比较高的话还有:去不了怎么办?能不能去?
另外还新增集尘系统测试,主要测试高效性,以及对各种污垢、垃圾的清理能力。
这里主要测试分为以下部分:
1.App使用评价。
2.导航/规划系统。
3.清洁效果测试。
4.悬崖探测测试。
5.学习/记忆功能测试。
6.噪音测试。
7.防缠绕测试。
8.CleanBase集尘系统测试。
1.App使用评价
说在前面:iRobot i7+作为一款学习型扫地机器人,首先是需要调教的。
比起上代9系,这代i7+在使用之前是需要进行一定的环境学习。
介于上篇评测评论是两个极端的方向,爱的非常爱,讨厌的非常讨厌,我这里也顺便做个讲解。
有的说小米吃灰了,iRobot 980完美。
有的说iRobot垃圾得不行,用一次就退货了,比米家石头差太多。
体验差别巨大,这里其实主要在于对iRobot的行为不太了解,实际上过了学习阶段每天计划任务启动不用管,稍微清理下障碍物就行了。
首先要连接扫地机器人,引导过程比较直观也简单,一次连上.
为达到最佳体验,这里还是建议重置多试几次,可能需要试出最合适的连接路径,另外包括更新也是属于比较慢的速度。
首次清扫提示可以激活智能地图,不同于9系列,这里地图升级为可自定义房间以及分区清扫。

App建议首先进行地图训练,训练模式时机器人在关闭胶刷和吸尘器的状态下进行模拟的全房覆盖清扫记忆,减少噪音及电池损耗,可以多跑几次,直到地图完成。
iRobot(9系以及i7+视觉导航款)必须配合App进行全屋学习,前3-5次清扫基本都处于学习状态,学习状态的扫地机器人会反复往返于家中的各个角落,在路口原地打转,去过的地方又去第二次等等,这个过程确实看起来简直傻得不行。

像上图这个过程,我一眼可以看出来,这是在拍全景图,玩过摄影的都知道全景拼接是怎么拍的,说是傻转我也不反驳,所以到底傻不傻还是靠自己判断了。
加上默认的自动模式会根据地面状况进行一次/多次清扫,以及细致的边角清扫,100㎡的房在前几次的清扫时间上会达到1.5-2小时左右,所以以这个时候的效率或者路径来评价全房的清扫效果是不够的。

iRobot Roomba 970并没有这样直观的地图学习提示,所以前几次清扫的表现作为与其他扫地机器人的对比评测标准结果可想而知了。
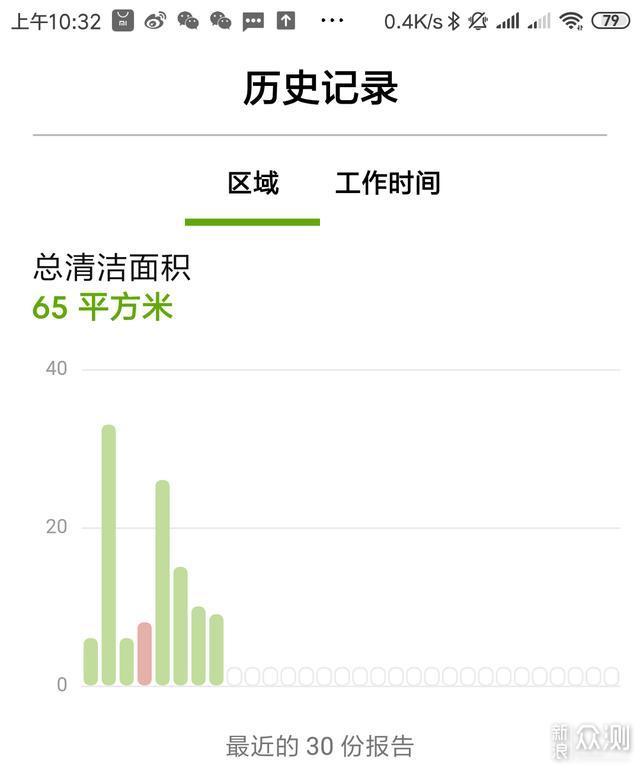
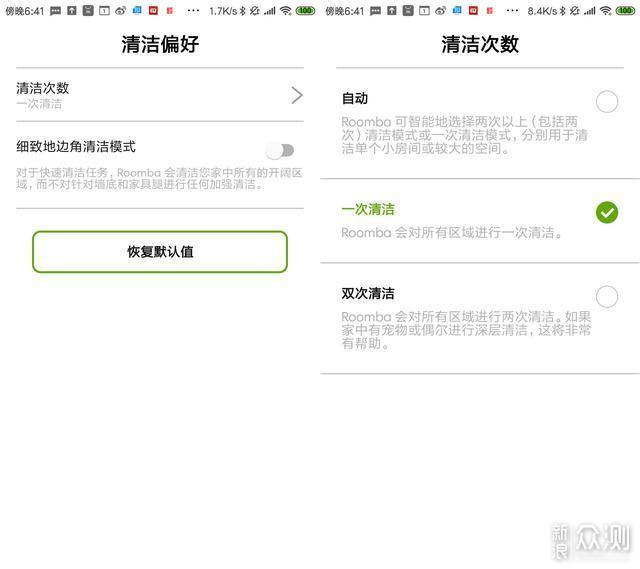
最后三次为开启一次清扫,相同面积的清扫记录,时间上是在不断的优化的,也与地面干净程度有关,三次均为同一天启动,显然污垢少,清扫时间更短。
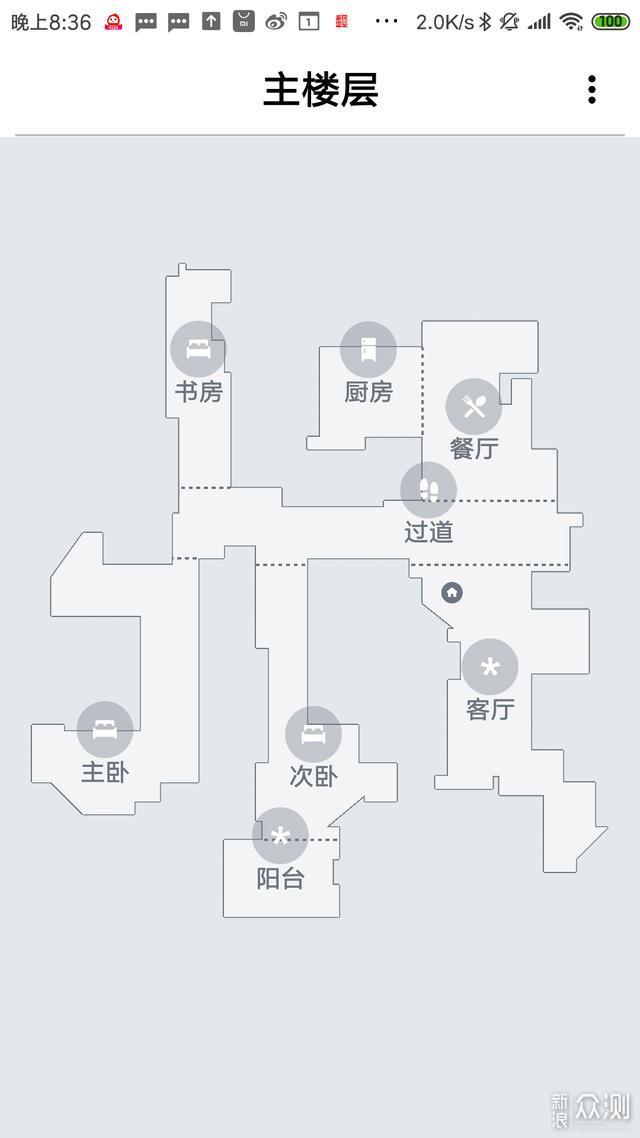
房间扫描完成后,可以设置间隔分隔以及指定房间名字,这与目前大多数国产一样,可以智能化分,分区清扫。
但存储地图的能力上iRobot Roomba i7达到了惊人的10张地图,且可以自动识别所处的环境对应的哪一张,多楼层也能轻松搞定。

不同的是iRobot Roomba i7+可以对多个楼层进行地图学习及记忆,记住多达10个不同的家居平面图,并且在早餐或者傍晚光线较弱的时候也可以通过训练增强弱光下的地图记忆。

多份地图,实际上这是针对欧美国家的多层独栋别墅服务的,进入其他曾经去过的空间不至于需要重新学习,节省时间,保持多层清扫的高效性。

在学习地图这里有个“也许不久即会推出”,iRobot似乎埋了个伏笔,也许在为能够让扫地机器人多楼层工作的升降设备预留了空间,从一楼扫到四楼并自动倒垃圾,未来看样子很美好。

另外,配备了Clean Base的Roomba i7会在通行后识别充电集尘座,并多出一个清空集尘盒的按钮,可以手动开启集尘盒清理,关于集尘盒下文将进行解读。
iRobot的App比起其他家的少了一点可玩性,比如手机遥控器这样的功能。不过就像我在前面说的,一个可以完全脱管的扫地机器人是不需要每天守着App的,用惯了iRobot Roomba 970的我告诉你,设置完了计划任务之后我三五个月都没有再打开过App,一款好的扫地机器人就像个田螺姑娘,在你不知不觉的时候搞定一切,让你忘掉扫地这回事。
iRobot的App方面胜在设置完分区以及计划任务之后就可以完全脱管了,之后除非升级,基本无需在开启。
2.导航/规划系统。

导航/规划系统上,本次主要升级的Imprint智能规划功能。
划区清扫目前已经不是什么独家技术了,LDS激光导航的SLAM算法更易实现,因为激光精度更高,更容易做到位置识别。

iRobot坚持的是vSLAM的视觉导航,因为视觉导航+识别技术才是物联网的最终的完美状态。

就像我们常用的导航,单纯的路线图的导航式不如立体实景AR导航来的信息更多更直观,作为拥有机器人羡慕嫉妒恨的大脑的人类当然选择AR增强,因为提供的众多信息可以让大脑更安全准确的做出判断,但是作为机器人而言左边的更节省算力,但简单带来的是更加容易出错。
9系列的摄像头以及处理器无法满足全房识别的精度,因为如果依靠摄像头3D建模带来的计算量是极其巨大的,估计一台高配置电脑才能实现基于摄像头的实时3D建模计算,9系应该是视频采集进行特征值的记忆,iRobot i7+这次的升级在摄像头分辨率以及算法和处理器上做了升级,能够支持全房的识别与导航,实现指划禁区等功能。
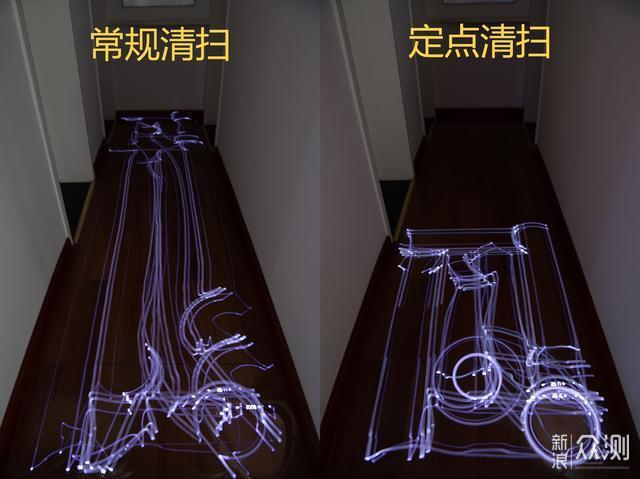
导航测试我无法做个全房的监测,且iRobot并没有实时路径,这里我只能测试一个区域清扫轨迹,轨迹记录了扫地机器人的行走路线。
为方便对比,我选取的之前产品评测中测试过的区域进行清扫覆盖轨迹记录,且此区域为已经学习识别过的空间,查看最大效率。

自动模式下会进行多次覆盖,并且会尝试开始地图识别,所以这里我开启两次清扫模式记录轨迹。
基本与iRobot Roomba 970的差不多,且处于无光环境,基本依靠的iAdapt3.0智能导航为基础进行覆盖,一次清扫的就不重复测试了,井字变弓字,下面Roomba 970的可以给你参考。
再附上几个其他扫地机器人的轨迹图,供大家参考。
iRobot Roomba 970轨迹。

米家扫地机器人。
伊莱克斯Pure i9。
实际上iRobot的轨迹会受实际地面污垢情况以及清扫面积影响,自动模式下会自主的进行判断,一次或者多次清扫(遇到大面积污垢会进行不止2次覆盖),所以效率上有所差别。
3.清洁效果测试。
清洁效果是个实战测试,撒上不同大小的粉尘类,污垢类,固体类垃圾查看清洁效果。

i7+参数上已经达到了iRobot 980的吸力,同为10倍于iRobot Roomba600系列的吸力,而iRobot 970则为5倍,吸力上增加了一倍,不过只是在地毯模式下的增压,常规状态下仍为iRobot 970的5倍。
所以可以预见的是地板清洁效果是与iRobot 970差不多的。

御用测试空间:2m×1.4m的宝宝围栏。

清扫测试物品:钢珠、黄豆、面包糠、面粉。
钢珠是加入的提高难度的测试,黄豆实际上与钢珠差不多,只是重量更轻,面包糠类似家中大部分常见的污垢与灰尘,面粉则可以代表粉尘、过敏原类物质。
可以测试扫地机器人对各类垃圾的清洁情况,下面测试开始。
钢珠清扫测试
钢珠主要是体积小,表面光滑,易滚动。

大部分被吸入尘盒,几个被打飞。
自动模式,机器人在小空间自动选择进行了多次井字型覆盖清扫,基本清除了地面上的钢珠,仅几颗被打飞的卡在角落。
黄豆清扫测试
黄豆比钢珠轻松一点,更易吸入。

还不错的清扫效果。

同样在自动模式下进行了多次覆盖。
面包糠清扫测试
面包糠模拟地板上常见固体垃圾。

大图看清扫效果还不错。

再看个前后对比的细节,非常高的清洁程度。
再看个动图,依然为多次覆盖。
面粉清扫测试
面粉模拟粉尘,以及看不见的过敏原的清扫效果。

这里直接看细节,大面积上的清扫还不错,但是面粉填缝依然是个问题。
多次覆盖后缝隙依然有面粉,这点比起伊莱克斯/戴森这样的纯吸尘器款要稍差一点。

附上伊莱克斯的面粉清扫图。

以及米家的面粉清扫图

iRobot 970面粉清扫图,i7+在面粉清扫上还是稍有优于iRobot 970的,主要在于覆盖次数以及滚刷上的改进。
面粉清扫是个难点,做吸尘器起家的伊莱克斯以及戴森这样的毛刷为主的辊刷相较而言更擅长粉尘以及过敏原类型的垃圾清除,

限于结构问题,吸口与驱动轮在同一横排,且未覆盖到驱动轮,沾染面粉是必然的,一切都是自动完成。
这里还是期待给个吸力档位自定义开关,分普通模式与强力模式以及自动模式,在体验上会更好一点。

测试后的尘盒,钢珠、黄豆、面包糠,面粉都有吸入,这一尘盒的垃圾稍后会在集尘装置里测试清空尘盒的效果。
清扫路线上可以看出Roomba i7+比Roomba 970进行了更多次的覆盖,直到地面清洁度已经很高了为止,除了缝隙中的少量面粉之外,表面上的面粉基本被清理的很干净。清扫的智能程度上也有不小的提升,可能是根据污垢探测器的反馈来控制清洁次数。
另外在钢珠清扫的时候我发现了个细节,不止一次滚刷被钢珠卡住,识别转动受限后会进行姿态调节以及反转滚刷等操作,自行排除故障,然后继续工作。
4.悬崖探测测试。
悬崖探测还是一如既往的高效。

四周一共六处悬崖探测器。

iRobot i7+
悬崖探测就不多测了,这上面没有很多的亮点,各家扫机器人都十分安全且高效。

不过弱光环境下初次巡山的时候遇到高度较低的悬崖还是有几率会掉坑,可能是学习模式下降低了传感器精度,最大限度的进行户型探索,后期熟悉地形了就没问题了,会避免去到之前掉落的区域。
这也是个学习的过程。
5.学习/记忆功能测试。
学习上主要为地图学习,从摄像头处获取的全景图片转化为地图数据。

扫地机器人识别清扫地图,绿色部分为已清扫位置。
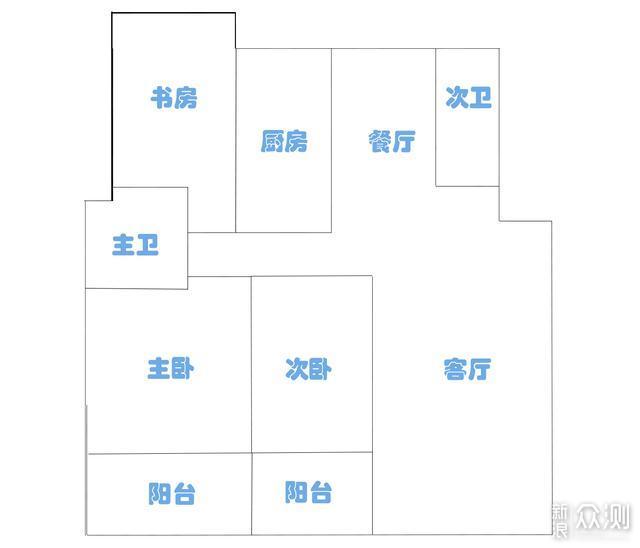
户型简图。
二者基本重合,视觉导航识别的地图精度还不错。
下面就测试下记忆能力,既然已经画出了地图,那么在已存储空间里的任意位置摆放都可以顺利的识别出自己的位置,并且完成清扫返回充电座。
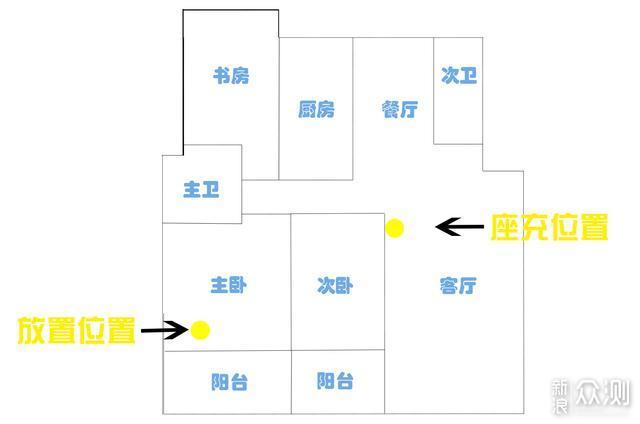
那么将iRobot i7放置于如图位置启动,看本次清扫地图有何表现。

进行了全屋清扫,并正常回到了集尘充电座,结束了清扫。
在房间地图识别上更进了一步,官方介绍是可以自动识别多层空间,并进行高效清扫,这里在地图绘制的精度与特征值上的记忆更多更精确,在获取过地图的地方只需要环顾一圈即可识别当前位置。
换不同的房子进行测试的时候也是可以直接识别并开始全房清扫的,当然这是针对别墅的多层结构的房屋设计的。
6.噪音测试。
噪音上,初次使用便能感觉到比iRobot 970噪音稍小。

显示噪音量为65-68db,这是比iRobot Roomba 970吸力更大的情况下发出的噪音。
再附上几个作参考。

iRobot Roomba 970噪音,最大73db。

伊莱克斯Pure i9最大80db。

米家扫地机器人,72db
未统一测试方法,作参考吧。
iRobot Roomba i7属于较低的噪音水平,看来尘盒与电机的改进还是非常有效的降低了噪音水平。
7.防缠绕测试。
这里直接测试防缠绕了,普通的桌椅脚脱困到现在已经不是扫地机器人的问题,最大的“死因”在被各种杂物缠绕,绞杀。
防缠绕是大部分扫地机器人没有的功能,大部分扫地机器人只是个执行傻命令的吸尘器,行动受阻就只能待在原地。除了iRobot,仅有浦桑尼克的一款有介绍脱困。
iRobot i7+则升级到了iAdapt3.0,脱困能力上也有所提升。
下面是实战脱困测试:

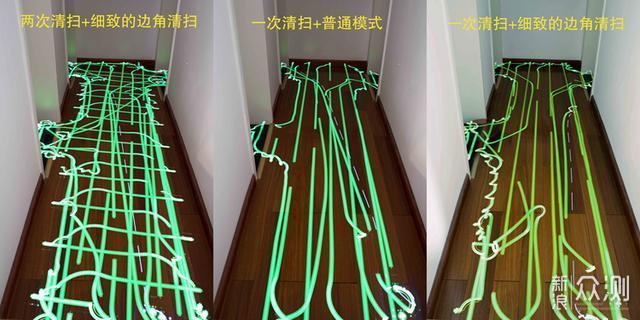
这里选取的最容易缠绕的软绳,在之前的测试中这根绳可以说是绞杀扫地机器人的高手,容易被驱动轮卷起,被滚刷卷绕。也放了片扫地机器人难以“下咽”的翘曲硬纸片,来测试脱困能力。
动图里可以看出,软绳被缠绕了两次,但扫地机机器人也摆脱了两次,硬纸片是吞了一半咽不下去之后吐了出来。边刷驱动轮,滚刷均可以识别是否受阻,并结合iAdapt 3.0导航的两万+种情况应对通过调整解决故障,而这都是它自己搞定的。
防缠绕算是杀手锏一般的技能,iRobot家独有,且十分实用,有过其他扫地机器人使用经验的就懂这种难能可贵,特别是家中人多或者有小孩的使用环境,不会因为一个小玩具,小卡片就死在原地。
8.CleanBase集尘系统测试。
CleanBase是这次比较大的升级,也是用户体验上的巨大提升,把以往每隔几天或者每周都要进行的清垃圾操作延长至几个月一次,极力减少操作的才是好的智能化设计。
对于CleanBase我有几个疑问:
清空尘盒后还需要再人工干预尘盒的清洁吗?集尘的高效性,对于像钢珠这样的比较重的固体垃圾能否有效的吸起。集尘袋的过滤性能,会不会有灰尘溢出。

这里我在清扫测试中的“战利品”可以验证第一点,各类杂物测试下集尘座的吸力。

每次清扫回充都会进行一次清空尘盒。

不过满仓垃圾在清洁后还余留了小部分,观察了下,优先吸走的是左侧出尘口位置的污垢。确实钢珠属于难吸取的固体,也与垃圾量有关,一次只清掉了半仓,不过我发现堆积在滤网口的面粉也被清理走了,包括尘滤也有了个反向除尘的效果。

介于一次吸取并不能完全清空,我决定再手动开启清理一次。

第二次集成清理后的尘盒,可以看到基本被清理完毕,不过尘盒内部残留了一些面粉的粉尘颗粒。不是有洁癖的话基本可以了,无需再用水清洗。

为测试高效性,我再塞了点较大块的橘子皮(丑柑的皮,比橘子皮更厚)进去,查看集尘系统的清洁效果。
也是分几次被吸入,吸力应该比扫地机器人上的10倍吸力更大。

再来看下集尘袋,白色集尘袋比较好观察灰尘的逃散与溢出情况,还不错,外部依然为白色,基本无溢出。
集尘袋居然也是个滤芯类材质,过滤性能还不差。

再掏出来这些天的“存货”,除了之前测试的材料,还有头发、超市小票、发卡、扎带、灰尘、塑料纸等,橘子皮也在列。
纠结尘袋能不能反复利用的我……觉得还是一次性扔掉更舒服,因为集尘时间长达三五个月,吸入的物质可能会有多种食物残渣,会发霉产生细菌,所以还是提起来扔掉顺手。
另外集尘袋和滤网都是可以吸附99%小到1微米的花粉、霉菌、螨虫和猫狗过敏源,对过敏人群也是非常友好的,集尘袋贵碎贵但确实也算值得。

所以,这个价值2000的集尘装置是个吸力不逊色于戴森的吸尘器,吸取钢珠也不在话下。
既然是个吸尘器,那么就有噪音问题,89db……确实是个暴躁的野兽。

配合集尘器专用的尘盒底部带一个单向开启的橡胶塞装置,密封力还不错,不过如果卡了体积比较大的物体,会影响工作状态下的吸力效果。
再来看看长发的卷绕情况,可以自动倒垃圾之后,主刷上缠绕的头发是唯一需要手动清理的地方了。
主刷现在可以一键式开启,单手即可操作,工作了十多天,取下来看看头发缠绕情况。

胶刷中间部分没有缠绕的头发,全部集中在了两端。

端部专门设计了个凹槽,用于囤积长发。

另一端几乎快缠满了,家里三个长发女性的掉发量惊人……

头发虽多,但不会打死结,因为没有毛刷,不会缠绕的非常紧,清理起来非常方便。

手一扣就下来了,其实还不算多,大部分进了集尘袋。
另外也支持天猫精灵语音操作,绑定iRobot App账号即可,这里就不细说了。

iRobot在扫地机器人行业不说引领时代的话也算是独树一帜了,从碰撞导航到规划导航,能力也在逐步提升。
独家的iAdapt导航系统是基于碰撞的规划导航,至今无第二家继续坚持碰撞式导航,碰撞导航是大多数扫地机器人厂家起步的方式,但别人家的做出来的饱受诟病,却在iRobot的多年调教下变成了高效的规划系统,且包含了高达两万种情况的脱困模式,视觉导航,双胶刷,这些是独家专利技术,而如今又带来了“自动倒垃圾”的集尘座,在“偷懒”上面永远有人比你想得更多。

iRobot这群来自麻省理工性格执着的机器人开发人员让我想起了Alpha Go,前面说到的能应对两万多种脱困情况,实际上是依靠大量的“实战”积累出来的,调教时间越长,越发的战无不胜,这也是AlphaGo在围棋上战胜人类的方式,并不是天生的强者,而是一步一脚印,数万亿次计数的实况模拟计算才爬上的高峰。
而当LDS激光导航厂商都在价格战里打得水深火热中的时候,视觉导航上iRobot已经不知不觉的调教了多年,且以高品牌溢价以及专利占据了全球大部分市场。看来iRobot的目标远不止扫地机器人,可以展望下视觉导航下的各种奇葩机器人了,像晾衣服机器人?整理鞋柜机器人?再过几年,你说谁又会吊打谁?
关注官方微博 微博
关注官方微信

Copyright © 1996-2024 SINA Corporation, All Rights Reserved 新浪公司 版权所有







