iRobot扫地机器人一周体验,到底值不值得买?
![]() 草哥不慌
2020-06-08 13:09
草哥不慌
2020-06-08 13:09
我们常说,科技改变生活,但往往很难描述到底什么被改变了。其实只要你稍微思考一下,就会发现(生活)科技的本质就是提供懒人式体验,能够很大程度地释放我们的双手,一个语音指令或者甚至通过机器学习,就能让原本很繁琐的事情一下变得轻松且简单。我一直觉得现代生活中最没用的东西,就是遥控器,很多时候你找遥控器的时间,通过语音或者手机App早就已经完成操作了。

当然,这是最初阶的智能。真正能够提升生活质量的科技,是像洗碗机、洗烘一体洗衣机、扫地(扫拖)机器人这样的产品,幸福感会随产品升级而不断提高,今天我要测评的产品,就是 iRobot Roomba 961 扫地机器人 这款产品。体验了一周时间,让我感受到了前所未有的轻松。
稍微关注过扫地机器人的朋友,应该都知道iRobot这个品牌,我的第一印象可能差不多,就是这个品牌的产品有点小“贵”,尤其是在大量国产扫地机器人品牌不断冒出来后,更显如此,但其实iRobot也有千把块的扫地机产品。

然后我稍微去了解了一下这个品牌,才知道原来这个美国公司1990年就成立了,扫地机器人也并非他们早期的主业,他们还设计制造军用、商用、医疗领域的机器人,家用机器人只是其中的一块业务而已,这样的背景之下,稍微高于行业的价格也是理所当然,至少证明这是一个有技术实力的品牌。
而家用机器人中的Roomba系列,是iRobot最知名的扫地机器人,今天咱们体验的主角Roomba 961就是这个系列定位中端的产品。

产品配件清单还是比较丰富的:一个Roomba 961 扫地机器人主题,一个Dual Mode Virtual Wall 虚拟墙,一个替换的滤网,一个替换的边刷,一个Home Base充电底座,一根充电线和2颗5号电池。
这次咱们跳过开箱的环节,直接进入产品体验的环节,使用前的引导和操作,说明书上都有,我就不多赘述了。
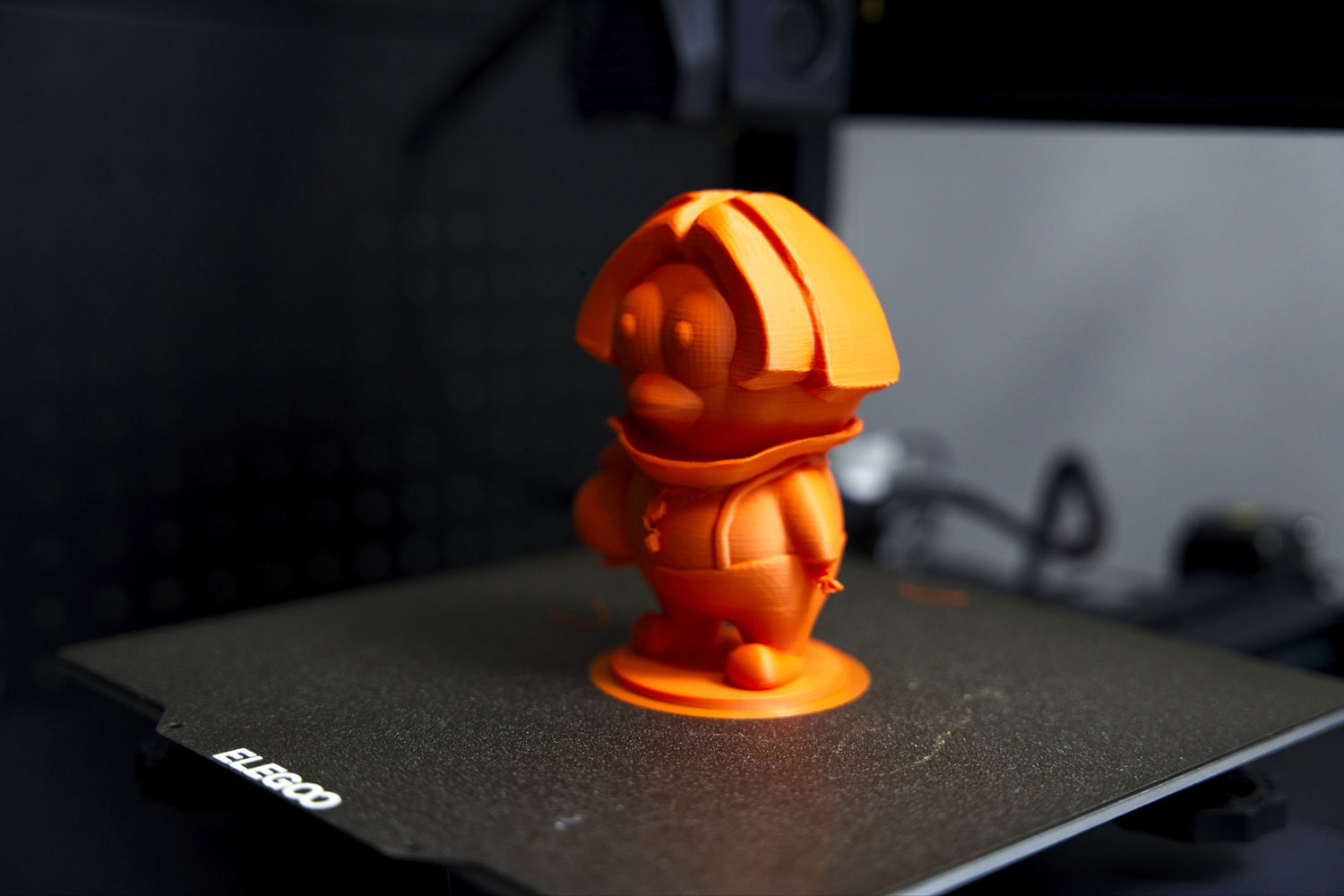
看到这款产品的第一眼,从黑金的配色就能看出一股浓浓的工业风,更准确地说应该是咖色或者暗金色,和市面上主流的扫地机器人纯白极简设计相比,Roomba 961看起来会更沉稳一些,就是印象中那种工业技术风的设计,有种轻奢的感觉,不过放在任何装修风格的房子里,都不会显得突兀,只是没有纯白那种更百搭而已。

因为我是第一次使用扫地机器人产品,所以也想给跟我一样,第一次使用的人解释一下扫地机器人普遍的工作原理:
其实很简单,扫地机器人就是一个能够自动吸尘、扫地的一款产品,能够自主在房间内完成地板的清理工作,并且将清理的垃圾存放在自带的收纳盒中,一般是工作时,由内部大量传感器协同,移动时配合边刷的使用,通过两个卷动式”扫把“吸入垃圾,来实现地面清洁的。


判断一款扫地机器人是否好用,我个人参考的标准是:导航能力(环境适应)、智能化(避障、扫地规划)、清洁能力(清扫效果)和便捷性,但最终还是凭自己的感受来判断产品是否适合自己。
我为什么迫切需要一台扫地机器人呢?原因主要是家里的两只猫,平时翻垃圾桶、偷吃东西弄得满地垃圾不说,光“掉毛”就够我这个资深鼻炎患者喝一壶了,平时走路不仅带风,还能带走地上的毛,空气中弥漫的都是细微的灰尘和猫毛,尤其是床底和沙发底下,平时清洁很难做,猫咪又喜欢躲在这些地方,晚上还要在一张床上睡,想想都觉得脏得要命。

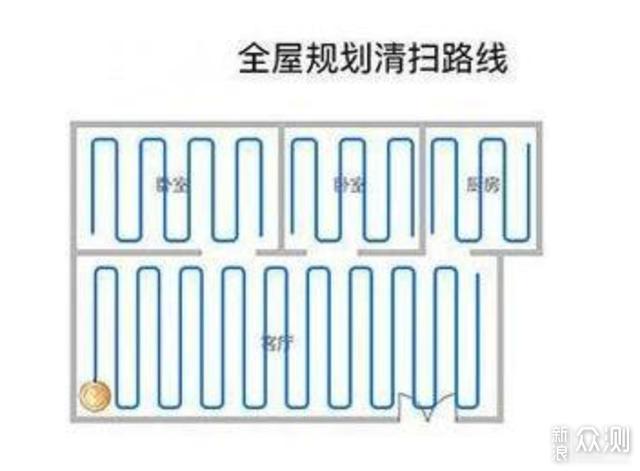
把Roomba充满电后开始扫地,果然没让我失望,路线是U型折返式全无规划,只要没有太高的“门槛”,扫地机器人就能自动完成全屋清理。
我这50平米的公寓,去掉厨房、卫生间、阳台,因为这几处的门槛都比较高,扫地机器人没办法跨过,大概有效面积也就剩下不到40平,再加上房间堆满了东西,一次清理的面积估计就20平米左不到,而Roomba适用于120平以上的大房子,瞬间感觉自己“不配”。
开始清扫时,猫咪还和机器人上演了一场现实版“不服就干”,猫咪挑衅失败,毕竟面对的是个机器人。

耗时半小时完成了卧室和客厅的第一次清扫,包括沙发底和床底、桌子底全部都清理到了,结果就是半小时尘盒就已经装满了,通过App提醒我让我清理,如果不清理的话,Roomba 961就没办法继续工作(默认,也可以通过app设置尘盒满了继续打扫),打开一看其他的垃圾很少,一盒子的猫毛和灰尘,我估计主要来源就是床底和沙发下!

Roomba的尘盒其实不算小,只是第一次清理垃圾实在太多了,因为接下来我设置了每天定时打扫,每天下班前一个小时自动开始工作,3、4次过后尘盒也没有溢出,说明这个尘盒应该一次可以容纳120平左右的日常清扫工作,中途不用清空尘盒。不过,我是因为测试尘盒的容量,所以才几天不清理,平时使用的话,最好还是用完就清,感觉更加卫生一些,毕竟是一盒垃圾,应该有不少细菌。
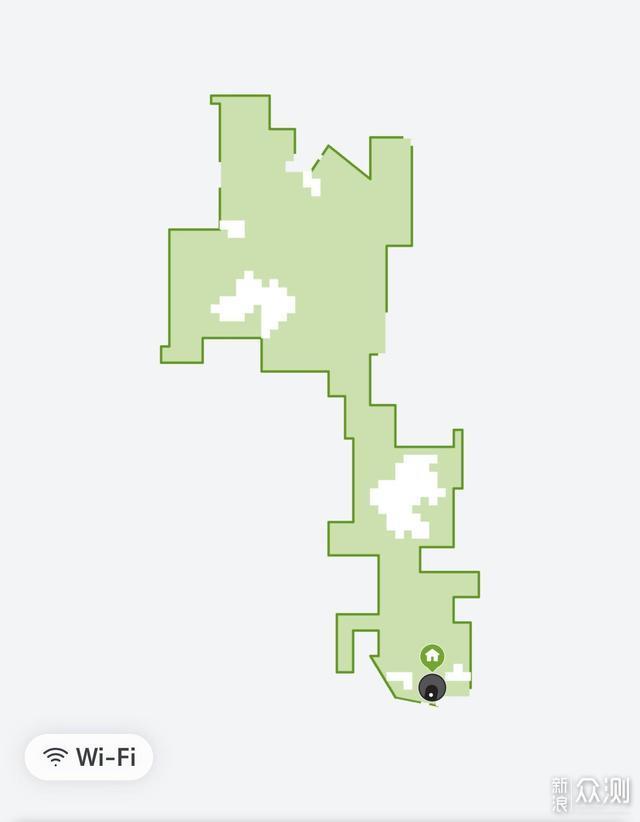
另外,我发现每天清理的时长也越来越少,这可能跟Roomba智能全景规划有关,简单来说就是通过摄像头和传感器,学习每次工作情况和房间内的布局,来调整机器人工作时的重点区域和障碍规避,通过Roomba的导航系统和vSLAM视觉运算处理技术,来创建可视化的“地标”来确定清洁位置,划分已清理和未清理的区域,来达到更高效的清理过程,Roomba 961扫地机器人的「智能化和导航能力」算是通过了初步考验。

结合这几天扫地机器人的工作情况,我建议大家平时使用扫地机器人的时候,尽量不要随意改动家具摆放位置,或者在机器人工作时,提前将家具摆放整齐,都能进一步提高扫地机器人的工作效率。
为了测试Roomba 961的智能避障能力以及清洁能力,我专门制造了一些阻碍和垃圾。
我用人体障碍和纸箱障碍方法测试,站在机器人清扫路线前方,或者往路上放一个大纸箱,大概率机器人会往身上“撞”。
然后我又把它放到了一个稍微大一点的纸箱内,不出意料它过来开始四处“碰壁”不停掉转方向,不过不是那种横冲直撞,而是点到即止的碰撞。

这说明它的设计就是如此,包括机器人前方有可回弹的保护圈,只要稍微碰到阻力,保护圈回弹后机器人就会开始调转方向,通过前端的阻力来识别是否是可穿越的障碍物,如果是软障碍,比如窗帘、门帘则继续行进,如果是较硬的障碍,就立刻掉转方向。

而像地毯这种厚度不高的坎,基本上是无障碍通行。
这跟他的摄像头应该有关系,如果能把摄像头设计在前方,那么通过摄像头加红外传感器,就可以直接通过智能扫描识别障碍,不用靠近就掉头。限制Roomba 961的摄像头是朝着前上方大概30-45度之间的角度,使用的vSLAM图像位移定位系统,通过扫描天花板图像的偏差来定位坐标,达到协助规划路线的作用。

可能有人会担心摄像头的作用仅仅如此吗?每天顶着个摄像头到处跑,会不会记录什么隐私的画面?这点可以不用担心,我通过路由器设备管理中心看到,这款扫地机器人一整天上传下载的数据量,不到1m,基本可以判断它没有往服务器上传任何带画面的数据。

下面我撕了一堆小纸屑放在路上,机器人所到之处都瞬间干净了,说明一些比较大的纸片,有时候也可以被吸入,吸力还是很大的。

不过很占用尘盒的空间,建议使用前先自己清理掉比较大的一些垃圾。使用前也尽量避免有线材或线头随便丢在地上,因为它的摄像头是朝上的,看不到地面上的东西,也会被吸入,如果线的另一端是固定的,很可能被卡住。

如果有某一块区域垃圾比较难清理,机器人会自动识别并来回清扫。
这个机器人本身的清洁模式也比较单一,就是通过智能规划路线来清理,不能通过App来遥控方向和清理的位置,但可以通过点按面板上的「准心」按键,激活局部环绕模式,简单来说就是在扫地机器人为中心,半径50厘米左右的范围内启动循环清扫模式,用来做局部深度清理,比如嗑瓜子的时候随便丢……

我又测试了一下扫地机器人在死角的清理能力,通过高速旋转的边刷,可以将墙壁和边角的一部分垃圾移动到双主刷吸入的范围内,快速吸入地面垃圾,整个过程还是比较快的。

但因为机器人不会贴着墙壁直线清理,碰到墙的话可能就会调整路线和方向,所以太靠墙的部分反而不太能清理干净,不过这仅限于我们手动把它“搬”过去清理,如果是按照全屋清扫的设定,机器人会在最后结束打扫之前沿着四周墙面彻底清理一遍。

现在我在家光脚走路,也不会在脚底板沾上灰尘或是猫毛之类的东西,再结合自己主动制造垃圾来测试清理的干净程度,足以说明这款Roomba 961扫地机器人的清洁能力我是满意的,不过扫地机工作的时候,声音是有些大的,整体超过了80dB,所以我设置的都是工作日下班前一个小时时间打扫,除了周末以外基本不会被机器人制造的声音所打扰。

用了一个多星期以来,最真实的感受还是,媳妇儿终于不用天天嚷嚷着让我去扫地了,以前因为扫地、洗碗、晾衣服这种小事,一个月得吵7、8次,这下至少不用因为谁扫地的问题,而产生“家庭矛盾“了。
最后再说说,这款扫地机器人其他的一些方面,比如开头我们说到的虚拟墙。这个虚拟墙是专门用来限制机器人工作区域的。

比如不希望它进入湿哒哒的厕所清理,那么就把虚拟墙打开,一共有两种模式,一种是环绕型区域保护,在以虚拟墙为中心1.2m半径范围内,扫地机不会进来打扫。

另一种是射线型,从虚拟墙开始共3m远的距离,将会有一道屏障,机器人无法通过。打开后我们肉眼是看不到任何变化的,只能通过机身上的表示来识别是否启用,以及启用的是哪种模式,怕机器人破坏家中一些摆件的时候,可以使用。

如果拿来清洁潮湿的东西,建议用完后清理一下机器人的滚轮和边刷,下次使用就不会“越扫越脏”,也能稍微延长使用寿命。
如果机器人工作时被卡住了,提拉摄像头前面的提手,就能暂停工作,把障碍物清理一下,再按CLEAN按键,机器人就会恢复工作,支持“断点续扫”的功能,会继续刚刚扫过的路线,不会重复打扫,这点还是比较聪明的。

另外,Roomba 961的充电底座比较小,但是两边要留一段空间,这样扫地机器人完成工作后,才能够准确回到底座自动充电,如果两边空间过于狭窄,可能会影响底座和扫地机器人之间的通信信号。
关于iRobot App的部分,其实也比较简单,它除了可以控制扫地机器人的工作状态,还可以简单设置定时清理周期和工作的模式,以及查找机器人位置,但整体的功能相对较简单,不过不同型号在功能上会有差异,使用App时也会有所不同,整体就是简洁,缺点是过于简洁,功能很少,用户可自定义的部分除了定时清理几乎没有。

不过,我反而觉得功能少不一定是坏事,恰恰说明了iRobot对产品的自信,你在使用Roomba 961的时候,需要做的只是设置一个固定的时间,扫地机器人定时帮你完成清扫的工作,而你可以完全不用干涉,这不就是我们理想的扫地机器人吗?

反而是一些智能扫地机器人,功能很多,看起来可玩性很高,实际上很多功能全都要手动操作、控制,大部分人应该都很少去使用,除非是在扫地机器人工作不能让你满意的时候,才会想到自己控制它来把打扫完成。
我们需要一台扫地机器人,最好的状态就是:除非垃圾装满了,否则我完全不去管你,由扫地机器人来全权负责我的家庭卫生。到点自动打扫,没电自动充电,尘盒满了通过弹窗提醒,我清理完你继续完成你的工作,这才是全自动扫地机器人,根本不需要人工去干预,所以目前为止我对这款iRobot扫地机器人Roomba 961还是相对较满意的,如果能够把噪音控制更低,那就真的很棒了。

首次使用扫地机器人,除了帮我完成家庭卫生的清洁,还解决了我的家务“分配”难题,让家庭关系更和谐,平时没事还能逗逗猫玩,在某种意义上确实是改变了我的生活,让生活朝着更轻松的方向发展。iRobot的产品属实可以,让我有种碰上“扫地僧”的感觉,看似功能简单,却能“一招制敌”,深藏不露。

如果说有什么缺点的话,就是声音真的有点吵,App功能可自定义的也很少,还有一点是价格相对较高,在扫地功能这部分问题不大。
那么以上,就是我对于这款iRobot 961扫地机器人的体验和感受,本产品由头条数码频道提供,如果你有什么疑问,欢迎在评论区和我一起讨论。
关注官方微博 微博
关注官方微信

Copyright © 1996-2025 SINA Corporation, All Rights Reserved 新浪公司 版权所有